


















2026
- Artificial vibrotactile feedback elicits neural correlates of sense of agency. Journal of NeuroEngineering and Rehabilitation 1 (23), 2026 more… BibTeX Full text ( DOI )
2025
- Skin-Machine Interface with Multimodal Contact Motion Classifier. 2025 IEEE-RAS 24th International Conference on Humanoid Robots (Humanoids), IEEE, 2025, 381-388 more… BibTeX Full text ( DOI )
- Music Familiarization Elicits Functional Connectivity Between Right Frontal/Temporal and Parietal Areas in the Theta and Alpha Bands. Brain Topography Volume 38, 2025 more… BibTeX Full text ( DOI )
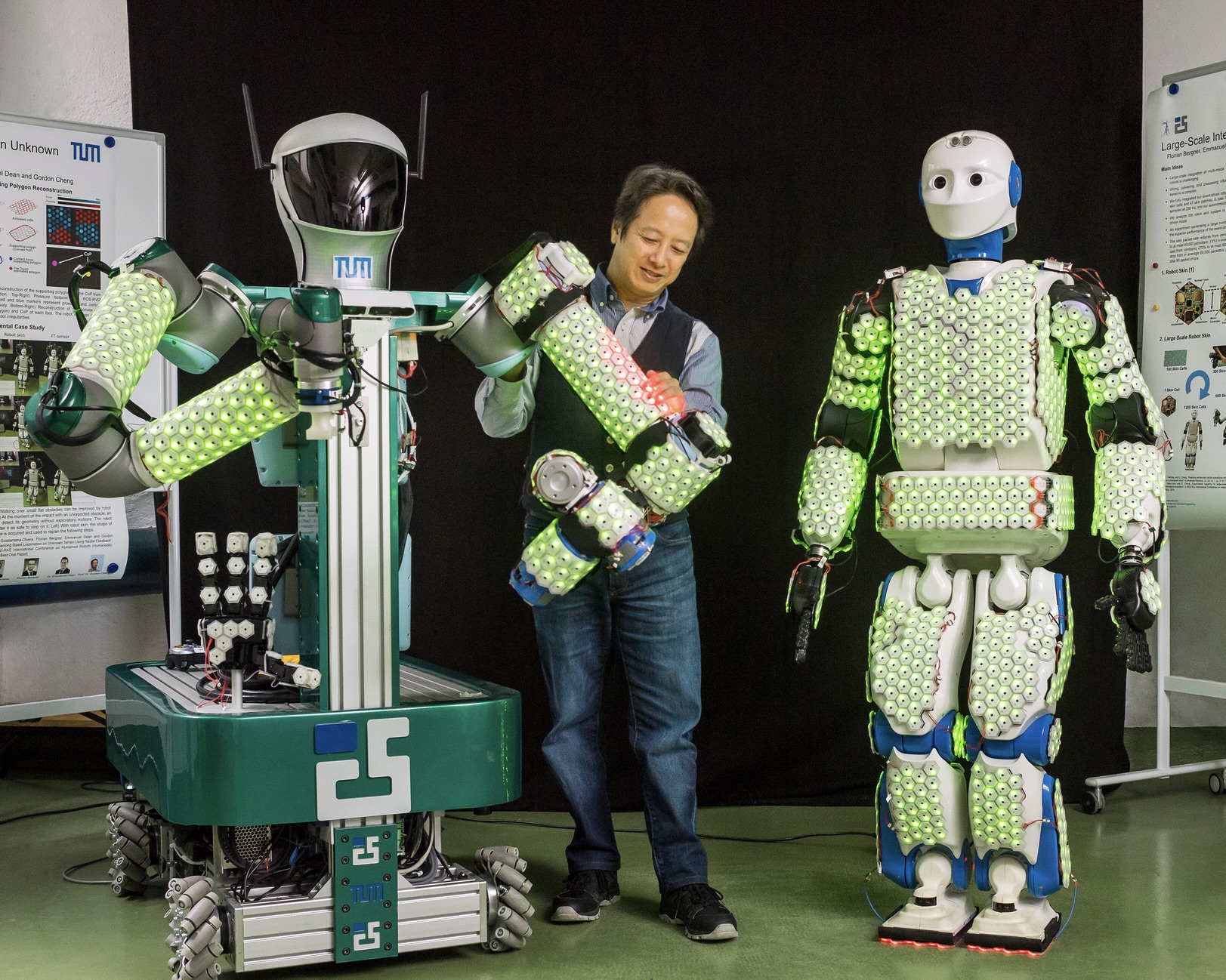
- Real-Time Control of a Humanoid Robot for Whole-Body Tactile Interaction. Advanced Intelligent Systems, 2025, 2500149 more… BibTeX Full text ( DOI )
- Transporting Heavy Payloads with a Humanoid riding a Hoverboard. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, 2025 more… BibTeX
- Diffusion Model and RRT*-Based Methods for Reflected Mass Optimization in Motion Planning. 2025 IEEE/SICE International Symposium on System Integration (SII), 2025 more… BibTeX Full text ( DOI )
- Human-Inspired Soft Anthropomorphic Hand System for Neuromorphic Object and Pose Recognition Using Multimodal Signals. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025, 14409-14416 more… BibTeX Full text ( DOI )
- Modulating Stiffness and Shape of a Soft, Textile-Based Structure Through Glass Transition of a Conductive Phase-Changing Polymer. Advanced Materials Technologies, 2025 more… BibTeX Full text ( DOI )
- Soft Sensory Socks Measure Contact Forces During Locomotion. 2025 IEEE/SICE International Symposium on System Integration (SII), 2025, 690-695 more… BibTeX Full text ( DOI )
- Normative Safety Regulations for Collaborative Robots. 2025 IEEE/SICE International Symposium on System Integration (SII), IEEE, 2025, 707-714 more… BibTeX Full text ( DOI )
- Speech prediction of a listener via EEG-based classification through subject-independent phase dissimilarity model. Scientific Reports 15 (01), 2025 more… BibTeX
- Guest Editorial Special Collection on Tactile Robotics. IEEE Transactions on Robotics, 2025 more… BibTeX Full text ( DOI )
- Abschlussbericht des COMMI-Projekts. , Ed.: DLR, 2025, more… BibTeX
- Tactile-based Dual-arm Manipulation with Physical Human-Robot Interaction. Proceedings of the 2025 ACM/IEEE International Conference on Human-Robot Interaction, 2025, 14-22 more… BibTeX
- Material-Driven Mechanical Programming of Soft Robotic Tentacles. 2025 IEEE/SICE International Symposium on System Integration (SII), 2025, 684-689 more… BibTeX Full text ( DOI )
- Humanoid Locomotion and Manipulation: Current Progress and Challenges in Control, Planning, and Learning. arxiv > cs > arXiv:2501.02116 Search..., 2025 more… BibTeX Full text ( DOI )
2024
- Using Marker-less Pose Estimation for the Detection and Classification of FES-induced Tremor. 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), 2024 more… BibTeX Full text ( DOI )
- Factors Influencing Human Trust Towards Robots: A Scoping Review. Human-Friendly Robotics 2024, 2024, 212–228 more… BibTeX Full text ( DOI )
- Object Classification Utilizing Neuromorphic Proprioceptive Signals in Active Exploration: Validated on a Soft Anthropomorphic Hand,. 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Heidelberg, Germany,, 2024, 901-906 more… BibTeX Full text ( DOI )
- Real-time Coordinated Motion Generation: A Hierarchical Deep Predictive Learning Model for Bimanual Tasks. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 more… BibTeX Full text ( DOI )
- Contact Stability Control of Stepping Over Partial Footholds Using Plantar Tactile Feedback. 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), October, Abu Dhabi, UAE., 2024 more… BibTeX
- On the impact of robot personalization on human-robot interaction: A review. Computer Science > Robotics, 2024 more… BibTeX Full text ( DOI )
- MRI Compatible Valve Enables Fast Actuation of Soft Hand Exoskeleton in Medical Imaging. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 2024, 1682-1687 more… BibTeX Full text ( DOI )
- Textile-Based Soft Wearable Robots to Improve Quality of Life Across Wide Spectrum of Applications. 2024 IEEE 21st International Conference on Smart Communities: Improving Quality of Life using AI, Robotics and IoT (HONET), IEEE, 2024 more… BibTeX
- End-to-End Visuomotor Learning from Virtual Environment to Real Robot. 2024 IEEE 20th International Conference on Automation Science and Engineering (CASE), 2024 more… BibTeX Full text ( DOI )
- Sensory integration for neuroprostheses: from functional benefits to neural correlates. Medical & Biological Engineering & Computing (volume 62), 2024, 2939–2960 more… BibTeX Full text ( DOI )
- Advancing Assessment Technologies for Movement Disorders in pwMS. Multiple Sclerosis Journal, 30 (2) , p. 60, 2024, 60 more… BibTeX
- Upper limb intention tremor assessment: opportunities and challenges in wearable technologyJ NeuroEngineering Rehabil. J NeuroEngineering Rehabil 8 (21), 2024 more… BibTeX Full text ( DOI )
- Tactile-Based Negotiation of Unknown Objects during Navigation in Unstructured Environments with Movable Obstacles. Advanced Intelligent Systems Volume 6, Issue 11, 2024 more… BibTeX
- RNN-Based Visual Guidance for Enhanced Sense of Agency in Teleoperation With Time-Varying Delays. IEEE ROBOTICS AND AUTOMATION LETTERS VOL. 9, NO. 12, 2024 more… BibTeX
- RNNPB-based Shared Control for Maintaining Sense of Agency in Robotic Teleoperation. 2024 IEEE International Conference on Cyborg and Bionic Systems (CBS), 2024 more… BibTeX Full text ( DOI )
- Passivity-Based Teleoperation With Variable Rotational Impedance Control. IEEE Robotics and Automation Letters Volume: 9, Issue: 12 (Volume: 9, Issue: 12), 2024 more… BibTeX Full text ( DOI )
2023
- Damping TENS-Induced Essential Tremor Symptoms in Activities of Daily Living Using the TuMove Wrist Exoskeleton. 2023 International Conference on Rehabilitation Robotics (ICORR), 2023, 1-6 more… BibTeX Full text ( DOI )
- Model predictive control of a soft elbow exosuit reduces interaction torque. 023 11th International IEEE/EMBS Conference on Neural Engineering (NER), 2023 more… BibTeX Full text ( DOI )
- Modulation of theta and gamma oscillations during familiarization with previously unknown music. Brain Research 1800, 2023 more… BibTeX
- Listening to familiar music induces continuous inhibition of alpha and low-beta power. JNP Journal of Neurophysiology Volume 19 (6), 2023, 1344-1358 more… BibTeX Full text ( DOI )
- Grip Force Dynamics During Exoskeleton-Assisted and Virtual Grasping. 2023 International Conference on Rehabilitation Robotics (ICORR), 2023, 1-6 more… BibTeX Full text ( DOI )
- Investigating the relationship between cue immersion and the strength of motor imagery during hand and wrist movements. 11th International IEEE EMBS Conference on Neural Engineering 2023, 2023 more… BibTeX Full text ( DOI )
- A Bio-Plausible Approach to Realizing Heat-Evoked Nociceptive Withdrawal Reflex on the Upper Limb of a Humanoid Robot. IEEE Robotics and Automation Letters (8), 2023, 3398-3405 more… BibTeX Full text ( DOI )
- A Bio-mimetic Neuromorphic Model for Heat-evoked Nociceptive Withdrawal Reflex in Upper Limb,. 11th International IEEE/EMBS Conference on Neural Engineering (NER),, 2023, 01-04 more… BibTeX Full text ( DOI )
- Multi-sensory fusion of wearable sensors for automatic grasping and releasing with soft-hand exoskeleton. 2023 IEEE International Conference on Soft Robotics (RoboSoft), 2023 more… BibTeX Full text ( DOI )
- Human-Centered Design of a Vibrotactile Sensory Substitution Belt for Feet Somatosensation in a Patient with Multiple Sclerosis. 11th International IEEE EMBS Conference on Neural Engineering 2023, 2023 more… BibTeX Full text ( DOI )
- Dynamic model of an online programmable textile soft actuator. 2023 IEEE International Conference on Soft Robotics (RoboSoft), 2023 more… BibTeX Full text ( DOI )
- Embedding Ethics into Neuroengineering Education: A Human-Centered Engineering Course on Neurorehabilitation. 11th International IEEE EMBS Conference on Neural Engineering 2023, 2023 more… BibTeX Full text ( DOI )
- Printed Silk Microelectrode Arrays for Electrophysiological Recoding and Controlled Drug Delivery. Advanced Healthcare Materials 12 (7), 2023 more… BibTeX Full text ( DOI )
- Feasibility Study of an Active Ball Joint Mechanism for a Wheelchair-Mounted 2-DOF Shoulder Exoskeleton. 21st International Conference on Advanced Robotics (ICAR), 2023, 220-225 more… BibTeX Full text ( DOI )
- Human-robot collaborative task planning using anticipatory brain responses. Plos one, 2023 more… BibTeX Full text ( DOI )
- Human-robot collaborative task planning using anticipatory brain responses. Plos one, 2023 more… BibTeX
2022
- Preemptive Foot Compliance to Lower Impact During Biped Robot Walking Over Unknown Terrain. IEEE Robotics and Automation Letters 7, 2022, 8006-8011 more… BibTeX Full text ( DOI )
- Screen-printed capacitive pressure sensors with high sensitivity and accuracy on flexible substrates. iopschience, 2022 more… BibTeX Full text ( DOI )
- Learning Causal Relationships of Object Properties and Affordances Through Human Demonstrations and Self-Supervised Intervention for Purposeful Action in Transfer Environments. IEEE Robotics and Automation Letters Volume 7 ( Issue 4), 2022, 11015 - 11022 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Tactile-based Assistive Method to Support Physical Therapy Routines in a Lightweight Upper-Limb Exoskeleton. IEEE Transactions on Medical Robotics and Bionics, 2022 more… BibTeX Full text ( DOI )
- Neuro-cognitive assessment of intentional control methods for a soft elbow exosuit using error-related potentials. Journal of NeuroEngineering and Rehabilitation, 2022 more… BibTeX Full text ( DOI )
- Sensory Systems for Robotic Applications. IET, 2022 more… BibTeX
- In-Hand Admittance Controller for a Robotic Assistive Walker Based on Tactile Grasping Feedback. IEEE Robotics and Automation Letters 7 (4), 2022, 8845 - 8852 more… BibTeX Full text ( DOI )
- Admittance Model Optimization for Gait Balance Assistance of a Robotic Walker: Passive Model-based Mechanical Assessment. 2022 International Conference on Robotics and Automation (ICRA), Philadelphia, PA, USA, 2022, 2022 more… BibTeX Full text ( DOI )
- Whole‐Body Multicontact Haptic Human–Humanoid Interaction Based on Leader–Follower Switching: A Robot Dance of the “Box Step” Authors. Advanced Intelligent Systems 4 (2), 2022 more… BibTeX Full text ( DOI )
- Brain computer interface to distinguish between self and other related errors in human agent collaboration. nature.com/scientific reports, 2022 more… BibTeX Full text ( DOI )
2021
- Perception and evaluation in human-robot interaction: The Human-Robot Interaction Evaluation Scale (HRIES) - a multicomponent approach of anthropomorphism. International Journal of Social Robotics, 2021 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Optimal Order Pick-and-Place of Objects in Cluttered Scene by a Mobile Manipulator. IEEE Robotics and Automation Letters, 2021, 6402-6409 more… BibTeX Full text ( DOI )
- An empirical study of active inference on a humanoid robot Publisher: IEEE. IEEE Transactions on Cognitive and Developmental Systems, 2021 more… BibTeX Full text ( DOI )
- Development of a wearable modular IMU sensor network suit with a distributed vibrotactile feedback for on-line movement guidance. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2021, 371-376 more… BibTeX Full text ( DOI )
- Demonstrating the viability of mapping deep learning-based EEG decoders to spiking networks on low-powered neuromorphic hardware. 43rd International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2021, 2021 more… BibTeX Full text ( DOI )
- Using Robot Skin to Support Physical Therapy Routines with a Lightweight Upper-Limb Exoskeleton. IEEE International Conference on Advanced Robotics (ICAR) 2021, 2021 more… BibTeX Full text ( DOI )
- Wrist Exoskeleton Design for Pronation and Supination using Mirrored Movement Control. IEEE International Conference on Advanced Robotics (ICAR) 2021, 2021 more… BibTeX Full text ( DOI )
- Inertial Parameter Identification in Robotics: A Survey. Applied Sciences Vol. 11 (Issue 9), 2021 more… BibTeX Full text ( DOI )
- Interactive Force Control Based on Multimodal Robot Skin for Physical Human−Robot Collaboration. Advanced Intelligent Systems, 2021 more… BibTeX Full text ( DOI )
- A Comparative Study on ErrPs for Different Usage Conditions of an Exoskeleton with a Mobile EEG Device. 43rd International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2021, 2021 more… BibTeX Full text ( DOI )
- Whole-Body Multicontact Haptic Human–Humanoid Interaction Based on Leader–Follower Switching: A Robot Dance of the “Box Step”. Advanced Intelligent Systems, 2021 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Visually-guided Grip Selection for Soft-Hand Exoskeleton. 43rd International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) 2021, 2021 more… BibTeX Full text ( DOI )
- EEG Decoding of Pain Perception for a Real-Time Reflex System in Prostheses. In: Brain-Computer Interface Research. Springer Professional, 2021, 47 - 58 more… BibTeX
2020
- Design and Realization of an Efficient Large-Area Event-Driven E-Skin. Sensors - Neuromorphic Computing for Event-Based Sensors and Actuators 20 (7), 2020 more… BibTeX Full text ( DOI )
- Robust Localization with Architectural Floor Plans and Depth Camera. IEEE/SICE International Symposium on System Integration (SII), 2020, 133-138 more… BibTeX Full text ( DOI )
- "TACTO-Selector: Enhanced Hierarchical Fusion of PBVS with Reactive Skin Control for Physical Human-Robot Interaction,”. IEEE International Conference on Robotics and Automation (ICRA), 2020, 9121-9127, more… BibTeX Full text ( DOI )
- Real-Time Robot Reach-To-Grasp Movements Control Via EOG and EMG Signals Decoding. 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020 more… BibTeX Full text ( DOI )
- The Robot as Scientist: Using Mental Simulation to Test Causal Hypotheses Extracted from Human Activities in Virtual Reality. IROS, 2020 more… BibTeX Full text (mediaTUM)
- EO-MTRNN: evolutionary optimization of hyperparameters for a neuro-inspired computational model of spatiotemporal learning. Biological Cybernetics , 2020 more… BibTeX Full text ( DOI )
- Calibration-free error-related potential decoding with adaptive subject-independent models: A comparative study. IEEE Transactions on Medical Robotics and Bionics, 2020 more… BibTeX
- Neuroengineering challenges of fusing robotics and neuroscience. Science Robotics (Vol. 5, Issue 49, eabd1911), 2020 more… BibTeX Full text ( DOI )
- Improving user comfort in auditory-steady-state-response brain-computer interface by using a co-adaptive stimulus. FENS 2020 Virtual Forum 2020Federation of European Neuroscience Societies (FENS) more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- High-Performance Perpendicularly-Enfolded-Textile Actuators for Soft Wearable Robots: Design and Realization. IEEE Transactions on Medical Robotics and Bionics, 2020 more… BibTeX Full text ( DOI )
- Plantar Tactile Feedback For Biped Balance and Locomotion on Unknown Terrain. International Journal of Humanoid Robotics, 2020, 1950036-1-21 more… BibTeX Full text ( DOI )
- Focusing on the face or getting distracted by social signals? The effect of distracting gestures on attentional focus in natural interaction. Psychological Research , 2020 more… BibTeX Full text ( DOI )
- Sensory stimulation enhances phantom limb perception and movement decoding. Journal of Neural Engineering Vol 17 No 5, 2020 more… BibTeX Full text ( DOI )
- A bump-attractor spiking neural network for motor adaptation and washout based on Norepinephrine release in primary motor cortex. CNS2020, 2020 more… BibTeX
- A bump-attractor spiking neural network for motor learning based on Norepinephrine release. FENS2020 2020Federation of European Neuroscience Societies (FENS) more… BibTeX
- Kognitive Systeme und Neurorobotik. In: Philosophisches Handbuch Künstliche Intelligenz. Springer Reference Geisteswissenschaften. Springer VS, Wiesbaden, 2020 more… BibTeX Full text ( DOI )
- A review on neural network models of schizophrenia and autism spectrum disorder. Neural Networks Vol 122, 2020, 338-363 more… BibTeX Full text ( DOI )
- Robot self/other distinction: active inference meets neural networks learning in a mirror. European Conference on Artificial Intelligence (ECAI 2020), 2020 more… BibTeX
- Second-order Kinematics for Floating-base Robots using the Redundant Acceleration Feedback of an Artificial Sensory Skin. 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020 more… BibTeX Full text ( DOI )
- Online Configuration Selection for Redundant Arrays of Inertial Sensors: Application to Robotic Systems Covered with a Multimodal Artificial Skin. IROS 2020, 2020 more… BibTeX Full text (mediaTUM)
- Passive BCI for assessment and adaptation of robotic systems during human-robot interaction. BCI: Science & Practice, Samara 2020, 2020 more… BibTeX
- Nanomesh pressure sensor for monitoring finger manipulation without sensory interference View ORCID Profile. Science Vol. 370 (Issue 6519,), 2020, 966-970 more… BibTeX Full text ( DOI )
- ErrP Components of Self- and Agent-Related Errors in Human-Agent Collaboration. BCI: Science & Practice, Samara 2020 , 2020 more… BibTeX
- Decoding of Pain Perception using EEG Signals for a Real-Time Reflex System in Prostheses: A Case Study. Nature Scientific Reports 10,No1 , 2020, 5606 more… BibTeX Full text ( DOI )
2019
- Attention-based active visual search for mobile robots. Autonomous Robots, 2019 more… BibTeX Full text ( DOI )
- Purposive learning: Robot reasoning about the meanings of human activities. Science Robotics 4 (26), 2019 more… BibTeX Full text ( DOI )
- A Comprehensive Realization of Robot Skin: Sensors, Sensing, Control, and Applications. Proceedings of the IEEE Volume 107 (10), 2019, 2034 - 2051 more… BibTeX Full text ( DOI )
- CHiMP: A Contact based Hilbert Map Planner. IEEE International Conference on Robotics and Automation (ICRA), 2019, 2019, 7 more… BibTeX Full text (mediaTUM)
- Whole-Body Active Compliance Control for Humanoid Robots with Robot Skin. 2019 International Conference on Robotics and Automation (ICRA), 2019, 5404--5410 more… BibTeX Full text ( DOI )
- Evaluation of a Large Scale Event Driven Robot Skin. IEEE Robotics and Automation Letters 4 (4), 2019, 4247 - 4254 more… BibTeX Full text ( DOI )
- A comparative study on adaptive subject-independent classification models for zero-calibration error-potential decoding. IEEE International Conference on Cyborg and Bionic Systems 2019 , 2019 more… BibTeX
- Towards multi-intelligences: are we there yet? - International Symposium on Machine Intelligence for Future Society 2019. 2019 more… BibTeX
- Realising self-organising robot skin - SelPhyS 2019. 2019 more… BibTeX
- End-to-end smart robot skin - Moscow - Skolkovo Robotic Forum. 2019 more… BibTeX
- Purposive learning from humans - Hamlyn Symposium for Medical Robotics. 2019 more… BibTeX
- Predictive Optimization of Assistive Force in Admittance Control-Based Physical Interaction for Robotic Gait Assistance. IEEE Robotics and Automation Letters 4 (4), 2019, 3609-3616 more… BibTeX Full text ( DOI )
- Pressure-Driven Body Compliance Using Robot Skin. IEEE Robotics and Automation Letters, 2019, 4418-4423 more… BibTeX Full text ( DOI )
- A prototype of a P300 based brain-robot interface to enable multi-modal interaction for patients with limited mobility. IEEE International Conference on Cyborg and Bionic Systems 2019 , 2019 more… BibTeX
- A Benchmarking Dataset for Automatic Symbolic Grounding from Virtual Demonstrations. 2nd International Workshop on Computational Models of Affordance in Robotics at the IEEE International Conference on Robotics and Automation (ICRA), 2019 more… BibTeX
- A Survey on Semantic-based Methods for the Understanding of Human Movements. Robotics and Autonomous Systems 119, 2019, 117–122 more… BibTeX Full text ( DOI )
- A Semantic‐Based Method for Teaching Industrial Robots New Tasks. KI - Künstliche Intelligenz 33 (2), 2019, 117–122 more… BibTeX Full text ( DOI )
- Tactile Hallucinations on Artificial Skin Induced by Homeostasis in a Deep Boltzmann Machine. IEEE International Conference on Cyborg and Bionic Systems 2019 , 2019 more… BibTeX
- Tactile-based Whole-body Compliance with Force Propagation for Mobile Manipulators. IEEE-TRO Transaction on Robotics, 2019 more… BibTeX Full text (mediaTUM)
- A computational model of human decision making and learning for assessment of co-adaptation in neuro-adaptive human-robot interaction. IEEE International Conference on Systems, Man, and Cybernetics 2019, 2019 more… BibTeX
- A closed-loop, music-based brain-computer interface for emotion mediation. PLoS ONE, 2019 more… BibTeX Full text ( DOI )
- Multi-Contacts Force-Reactive Walking Control duringPhysical Human-Humanoid Interaction. IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), 2019, 33-39 more… BibTeX
- Reward-Punishment Actor-Critic Algorithm Applying to Robotic Non-grasping Manipulation. 2019 Joint IEEE 9th International Conference on Development and Learning and Epigenetic Robotics (ICDL-EpiRob), 2019, 2161-9484 more… BibTeX Full text ( DOI )
- Validating deep neural networks for online decoding of motor imagery movements from EEG signals. Sensors and Actuators A: Physical, 19 (1), 2019, 210 more… BibTeX
- Enabling the sense of touch in EMG-controlled hand prostheses using vibro-tactile stimulation. 9th International IEEE/EMBS Conference on Neural Engineering (NER), 2019 more… BibTeX Full text ( DOI )
2018
- Active Prior Tactile Knowledge Transfer for Learning Tactual Properties of New Objects. Sensors and Actuators A: Physical, 18 (2), 2018 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Over-Stretching Tolerant Conductors on Rubber Films by Inkjet-Printing Silver Nanoparticles for Wearables. Polymers 10 (12), 2018, 1413 more… BibTeX
- Classification and regression of spatio-temporal signals using NeuCube and its realization on SpiNNaker neuromorphic hardware. Journal of neural engineering, 2018 more… BibTeX
- A Robust and Efficient Dynamic Network Protocol for a large-scale artificial robotic skin. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, 1600 - 1605 more… BibTeX Full text (mediaTUM)
- Adaptive Friction Compensation for Humanoid Robots without Joint-Torque Sensors. IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), 2018, 980 - 985 more… BibTeX Full text ( DOI )
- Integration of Advanced Robotic Technologies for Rapidly Deployable Industrial Robots. IEEE Transactions on Industrial Informatics (4), 2018 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- A Self-Verifying Cognitive Architecture for Robust Bootstrapping of Sensory-Motor Skills via Multi-Purpose Predictors. IEEE Transactions on Cognitive and Developmental Systems, 2018 more… BibTeX Full text ( DOI )
- Efficient Distributed Torque Computation for Large Scale Robot Skin. 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, 1593 - 1599 more… BibTeX Full text (mediaTUM)
- Sensorimotor learning for artificial body perception. International Workshop on Crossmodal Learning for Intelligent Robotics, IEEE/RSJ Intelligent Robots and Systems (IROS), 2018 more… BibTeX Full text (mediaTUM)
- AI in the real world: from neuroscience to robotic innovations -William Mong Distinguished Lectures in Engineering, Hon Kong. 2018 more… BibTeX
- Making the best of pretouch - 1st Workshop on Proximity Perception in Robotics at IROS 2018. 2018 more… BibTeX
- AI In The Real World: From Neuroscience To Robotic Innovations - DIGITAL CONVENTION 2018. 2018 more… BibTeX
- Enhancing Biped Locomotion on Unknown Terrain Using Tactile Feedback. IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), 2018, 47 - 52 more… BibTeX Full text ( DOI )
- Robust tactile descriminating objects from textural properties via artificial robotic skin. IEEE Transactions on Robotics 34 (4), 2018, 985-1003 more… BibTeX
- Accelerating the teaching of industrial robots by re-using semantic knowledge from various domains. Workshop WORKMATE: the WORKplace is better with intelligent, collaborative, robot MATEs at the IEEE International Conference on Robotics and Automation. May 2018, Brisbane, Australia. , 2018 more… BibTeX Full text (mediaTUM)
- Hierarchical Force and Positioning Task Specification for Indirect Force Controlled Robots. IEEE Transactions on Robotics 34 (1), 2018, 280 - 286 more… BibTeX Full text (mediaTUM)
- Robust Tactile Descriptors for Discriminating Objects From Textural Properties via Artificial Robotic Skin. IEEE Transactions on Robotics 34 (4), 2018, 985-1003 more… BibTeX Full text ( DOI )
- Tactile-based Active Object Discrimination and Target Object Search in an Unknown Workspace. Autonomous Robots, 2018, 1573-7527 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Drifting perceptual patterns suggest prediction errors fusion rather than hypothesis selection: replicating the rubber-hand illusion on a robot. IEEE international conference on development and learning and on epigenetic robotics (ICDL-Epirob), 2018 more… BibTeX
- Active Attention Applications in Robotics. International Workshop on Active vision, Attention, and Learning, IEEE Developmental Learning and Epigenetic Robotics (ICDL-Epirob), 2018 more… BibTeX
- Active inference with function learning for robot body perception. International Workshop on Continual Unsupervised Sensorimotor Learning, IEEE Developmental Learning and Epigenetic Robotics (ICDL-Epirob), 2018 more… BibTeX
- Adaptive robot body learning and estimation through predictive coding. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018)I, 2018 more… BibTeX
- Active Attention Applications in Robotics. International Workshop Visual Search and Selective Attention (VSSA IV), 2018 more… BibTeX
- Replicating Body Illusions on a Robot with Predictive Coding Models. International Conference on The Open Self: Investigating the Boundaries of the Self: Bodily, Social and Technological 2018 more… BibTeX
- A feasibility study for validating robot actions using EEG-based error-related potentials. International Journal of Social Robotics, Vol.5, Number 4, , 2018 more… BibTeX Full text ( DOI )
- Human-agent co-adaptation using error related potentials. Journal of Neural Engineering, 2018 more… BibTeX Full text ( DOI )
- Efficient Event-Driven Forward Kinematics of Open Kinematic Chains with O (Log n) Complexity. 2018 IEEE International Conference on Robotics and Automation (ICRA), 2018, 6975 - 6982 more… BibTeX
- Gumpy: a python toolbox suitable for hybrid brain-computer interfaces. Journal of Neural Engineering, 2018 more… BibTeX
2017
- A closed-loop Brain-Computer Music Interface for continuous affective interaction. International Conference on Orange Technologies, ICOT2017 (8.-10.12.2017), 2017 ICOT2017 more… BibTeX
- Effects of short-term piano training on measures of finger tapping, somatosensory perception and motor-related brain activity in patients with cerebral palsy. Neuropsychiatric Disease and Treatment, 2017 more… BibTeX Full text (mediaTUM)
- TOMM: Tactile Omnidirectional Mobile Manipulator. 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017Singapore, May 29 - June 3, 2017, 2441-2447 more… BibTeX
- Efficient Event-Driven Reactive Control for Large Scale Robot Skin. 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017, 394 - 400 more… BibTeX Full text (mediaTUM)
- Using Intentional Contact to Achieve Tasks in Tight Environments. 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017, 1000 - 1005 more… BibTeX Full text (mediaTUM)
- Added Value of Gaze-Exploiting Semantic Representation to Allow Robots Inferring Human Behaviors. ACM Transactions on Interactive Intelligent Systems, Vol. 7, No. 1, Article 5 7, 2017 more… BibTeX
- Added Value of Gaze-Exploiting Semantic Representation to Allow Robots Inferring Human Behaviors. ACM Transactions on Interactive Intelligent Systems (TiiS) 7 (1), 2017 more… BibTeX Full text ( DOI )
- Dynamic motion learning for multi-DOF flexible-joint robots using active–passive motor babbling through deep learning. Advanced Robotics 31 (18), 2017, 1002-1015 more… BibTeX Full text ( DOI )
- Tactile-based Object Center of Mass Exploration and Discrimination. IEEE International Conference on Humanoid Robots (Humanoids), 2017 more… BibTeX Full text (mediaTUM)
- Active Tactile Transfer Learning for Object Discrimination in an Unstructured Environment using Multimodal Robotic Skin. International Journal of Humanoid Robotics (IJHR), 2017 more… BibTeX Full text (mediaTUM)
- A Tactile-based Framework for Active Object Learning and Discrimination using Multi-modal Robotic Skin. IEEE Robotics and Automation Letters 2 (4), 2017, 2143-2150 more… BibTeX Full text (mediaTUM)
- Enactive Self: a study of engineering perspectives to obtain the sensorimotor self through enaction. IEEE International Conference on Developmental Learning and Epigenetic Robotics , 2017 more… BibTeX Full text (mediaTUM)
- O (log sn) algorithm for forward kinematics under asynchronous sensory input. 2017 IEEE International Conference on Robotics and Automation (ICRA), 2017, 2502-2507 more… BibTeX Full text (mediaTUM)
- A simple and practical sensorimotor EEG device for recording in patients with special needs. Neurotechnix2017, CogNeuroEng 2017, Symposium on Cognitive Neural Engineering , 2017Understanding, Decoding and Interfacing with Cognitive Level Processes in the Brain through Neurotechnology more… BibTeX Full text (mediaTUM)
- On-Line Simultaneous Learning and Recognition of Everyday Activities from Virtual Reality Performances. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2017)I, 2017 more… BibTeX
- A Scalable Method for Multi-Stage Developmental Learning for Reaching. IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob), 2017 more… BibTeX Full text (mediaTUM)
2016
- Event-based signaling for large-scale artificial robotic skin - Realization and performance evaluation. 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, 4918 - 4924 more… BibTeX Full text (mediaTUM)
- Long-Term Training with a Brain-Machine Interface-Based Gait Protocol Induces Partial Neurological Recovery in Paraplegic Patients. Nature Scientific Reports (6), 2016 more… BibTeX Full text ( DOI )
- Robotic technologies for fast deployment of industrial robot systems. IEEE Industrial Electronics Conference (IEEE IECON2016), 2016 more… BibTeX Full text (mediaTUM)
- From Multi-modal Tactile Signals to a Compliant Control. IEEE-RAS International Conference on Humanoid Robots 2016, 2016 more… BibTeX Full text (mediaTUM)
- Progressive Learning of Sensory-Motor Maps through Spatiotemporal Predictors. IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob), 2016 more… BibTeX Full text (mediaTUM)
- Motion Generation of Flexible Object Folding Task applied on Humanid Robot Using Deep Learning. 78th national conference of Processing Society of Japan, 2016 more… BibTeX Full text (mediaTUM)
- General Recognition Models Capable of Integrating Multiple Sensors for Different Domains. IEEE-RAS International Conference on Humanoid Robots 2016, 2016 more… BibTeX Full text (mediaTUM)
- Partitioning Algorithm for a Resource-Constrained Robotic Skin Sensor Network. IEEE International Black Sea Conference on Communications and Networking (BlackSeaCom), Varna, Bulgaria, June 2016, 2016 more… BibTeX Full text (mediaTUM)
- Tactile-based Manipulation of Deformable Objects with Dynamic Center of Mass. IEEE-RAS International Conference on Humanoid Robots 2016, 2016 more… BibTeX Full text (mediaTUM)
- Re-using Prior Tactile Experience by Robotic Hands to Discriminate In-Hand Objects via Texture Properties. IEEE International Conference on Robotics and Automation (ICRA 2016), 2016 more… BibTeX Full text (mediaTUM)
- Robots with self-perception: objects discovery and scene disambiguation using visual, proprioceptive and tactile cues correlation during interaction. Robotics in the 21st century: Challenges and Promises International Workshop (funded by the Volkswagen Foundation and the HeKKSaGOn Network) 2016 more… BibTeX
- Yielding self-perception in robots through sensorimotor contingencies. IEEE Transactions on Cognitive and Developmental Systems, 2016 more… BibTeX Full text (mediaTUM)
- Multisensory Object Discovery via Self-detection and Artificial Attention. IEEE International Conference on Developmental Learning and Epigenetic Robotics , 2016 more… BibTeX Full text (mediaTUM)
- Tactile-based Compliance with Hierarchical Force Propagation for Omnidirectional Mobile Manipulators. IEEE/RAS International Conference on Humanoid Robots (Humanoids2016), 2016 more… BibTeX Full text (mediaTUM)
- Integration of a Thin Film PDMS-Based Capacitive Sensor for Tactile Sensing in an Electronic Skin. Journal of Sensors Vol 16, 2016 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- A simple and practical prototype of a sensorimotor EEG device. Bernstein Conference on Computational Neuroscience 2016 more… BibTeX
- Detecting erroneous robot behavior from the electroencephalogram (EEG) during human robot interaction. Bernstein Conference 2016 more… BibTeX
- A neuro-based method for detecting context-dependent erroneous robot action. IEEE-RAS International Conference on Humanoid Robots 2016 , 2016 more… BibTeX Full text (mediaTUM)
- Embodied artificial agents for understanding human social cognition. Royal Society of London 371: 20150375, 2016 more… BibTeX
- Extracting general task structures to accelerate the learning of new tasks. IEEE-RAS International Conference on Humanoid Robots 2016 , 2016 more… BibTeX Full text (mediaTUM)
2015
- Event-based signaling for reducing required data rates and processing power in a large-scale artificial robotic skin. 015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015, 2124 - 2129 more… BibTeX Full text (mediaTUM)
- Augmenting Affect from Speech with Generative Music. CHI EA ‘15, 2015Proceedings of the 33rd Annual ACM Conference Extended Abstracts on Human Factors in Computing Systems (CHI EA ‘15) more… BibTeX Full text (mediaTUM)
- Generating Compact Models for Traffic Scenarios to Estimate Driver Behavior Using Semantic Reasoning. IROS, International Conference on Intelligent Robots and Systems, 20157th International workshop on Planning, Perception and Navigation for Intelligent Vehicles, IROS, 69-74 more… BibTeX Full text (mediaTUM)
- Understanding the intention of human activities through semantic perception: observation, understanding and execution on a humanoid robot. Advanced Robotics 29 (5), 2015, 345-362 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Understanding the intention of human activities through semantic perception: observation, understanding and execution on a humanoid robot. Advanced Robotics 29 (5), 2015, 345-362 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Robust Semantic Representations for Inferring Human Co-manipulation Activities even with Different Demonstration Styles. 15th IEEE-RAS International Conference on Humanoid Robots, 2015 more… BibTeX Full text (mediaTUM)
- Transferring Skills to Humanoid Robots by Extracting Semantic Representations from Observations of Human Activities. Artificial Intelligence Journal, 2015 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Dynamic Motion Learning for a Flexible-Joint Robot using Active-Passive Motor Babbling,. The 33rd Annual Conference of the Robotics Society of Japan, 2015, 2G1-07 more… BibTeX Full text (mediaTUM)
- Realizing whole-body tactile interactions with a self-organizing, multi-modal artificial skin on a humanoid robot. Advanced Robotics 1 (29), 2015, 51--67 more… BibTeX
- Dexterous Hands Learn To Re-Use The Past Experience To Discriminate In-Hand Objects From The Surface Texture. 33rd Annual Conference of the Robotics Society of Japan (RSJ 2015), 2015 more… BibTeX Full text (mediaTUM)
- Humanoids Learn Touch Modalities Identification via Multi-Modal Robotic Skin and Robust Tactile Descriptors. Advanced Robotics , 2015 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- In-Hand Object Recognition via Texture Properties with Robotic Hands, Artificial Skin, and Novel Tactile Descriptors. IEEE-RAS 15th International Conference on Humanoid Robots (Humanoids), 2015 more… BibTeX Full text (mediaTUM)
- Online Prediction of Activities with Structure: Exploiting Contextual Associations and Sequences. 15th IEEE-RAS International Conference on Humanoid Robots, 2015 more… BibTeX Full text (mediaTUM)
- New Materials and Advances in Making Electronic Skin for Interactive Robots. Advanced Robotics , 2015 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Predictive modeling of higher-cognitive processes involved in social engagement based on electroencephalography (EEG). Proceedings of the Bernstein Conference 2015 (Bernstein Conference 2015) , 2015Bernstein Conference 2015 more… BibTeX Full text (mediaTUM)
- Humans are Well Tuned to Detecting Agents Among Non-agents: Examining the Sensitivity of Human Perception to Behavioral Characteristics of Intentional Systems. International Journal of Social Robotics, Vol.5, Number 4, 7 (5), 2015, 767-781 more… BibTeX Full text ( DOI )
- Autistic traits and sensitivity to human-like features of robot behavior. Interaction Studies Vol 16 (2), 2015, 219 -248 more… BibTeX Full text ( DOI )
2014
- The walk again project: Brain-controlled exoskeleton locomotion. Neuroscience Meeting 2014, 2014 more… BibTeX Full text (mediaTUM)
- A fast and scalable system for visual attention, object based attention and object recognition for humanoid robots. IEEE-RAS International Conference on Humanoid Robots, 2014 more… BibTeX Full text (mediaTUM)
- A Neuronal-inspired Computational Architecture for Spatio-Temporal Visual Processing. Journal of Biological Cybernetics, 2014 more… BibTeX
- A scalable and efficient Method for Salient Region Detection Using Sampled Template Collation. IEEE International Conference on Image Processing, 2014ICIP 2014 more… BibTeX Full text (mediaTUM)
- Sampled Template Collation for Simulating Visual Attention and Object-Based Selection. Bernstein Conference, 2014 more… BibTeX Full text (mediaTUM)
- Versatile Modular Electronics for Rapid Design and Development of Humanoid Robotic Subsystems. IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM2014), 2014AIM2014 more… BibTeX Full text (mediaTUM)
- Realising Herbert: An Affordable Design Approach of an Anthropometrically Correct Compliant Humanoid Robot. Proceedings of the 14th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2014), 2014Humanoid 2014 more… BibTeX Full text (mediaTUM)
- A new method for solving 6D Image-Based Visual Servoing with virtual composite camera model. Humanoid Robots, 201414th IEEE-RAS International Conference on Humanoid Robots, 519-525 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- A new method for solving 6D Image-Based Visual Servoing with Virtual Composite camera model. IEEE-RAS International Conference on Humanoid Robots, 2014 more… BibTeX Full text (mediaTUM)
- Predictive Action Selector for Generating Meaningful Robot Behaviour from Minimum Amount of Samples. IEEE International Conference on Development and Learning and on Epigenetic Robotics (ICDL-EpiRob), 2014 more… BibTeX Full text (mediaTUM)
- Constrained Manipulation in Unstructured Environment Utilizing Hierarchical Task Specification for Indirect Force Controlled Robots. ICRA 2014, 2014 more… BibTeX Full text (mediaTUM)
- Hierarchical Inequality Task Specification for Indirect Force Controlled Robots using Quadratic Programming. IEEE/RSJ International Conference on Intelligent Robots and Systems , 2014 more… BibTeX Full text (mediaTUM)
- Humanoid Robotics and Neuroscience: Science, Engineering and Society. Frontiers in Neuroengineering Series. CRC Press, 2014 more… BibTeX
- A concurrent real-time biologically-inspired visual object recognition system. IEEE International Conference on Robotics and Automation (ICRA 2014) May 31 - June 7, 2014 Hong Kong, China , 2014 more… BibTeX Full text (mediaTUM)
- Multi-Layered Multi-Pattern CPG for Adaptive Locomotion of Humanoid Robots. Journal of Biological Cybernetics, 2014 more… BibTeX
- iCub@ICS-TUM: Semantic Reasoning, Constrained Manipulation and Humanoid Vision enable on the iCub. ICRA 2014, 2014 more… BibTeX
- Automatic Segmentation and Recognition of Human Activities from Observation based on Semantic Reasoning. IEEE/RSJ International Conference on Intelligent Robots and Systems , 2014 more… BibTeX Full text (mediaTUM)
- Understanding Human Activities from Observation via Semantic Reasoning for Humanoid Robots. IROS Workshop on AI and Robotics, 2014IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2014), more… BibTeX Full text (mediaTUM)
- Bootstrapping Humanoid Robot Skills by Extracting Semantic Representations of Human-like Activities from Virtual Reality. IEEE-RAS International Conference on Humanoid Robots, 2014 more… BibTeX Full text (mediaTUM)
- Humanoids Learn Object Properties From Robust Tactile Feature Descriptors vai Multi-Modal Artificial Skin. IEEE-RAS International Conference on Humanoid Robots, 2014 more… BibTeX Full text (mediaTUM)
- The walk again project (wap): Sensory feedback for brain controlled exoskeleton. Neuroscience Meeting 2014, 2014 more… BibTeX Full text (mediaTUM)
- When to engage in interaction - and how? EEG-based enhancement of robot’s ability to sense social signals in HRI. IEEE-RAS International Conference on Humanoid Robots, 2014 more… BibTeX Full text (mediaTUM)
2013
- A Biologically-Motivated Approach to Online Learning of a Dictionary of Features from Natural Images for Computational Object Recognition. Bernstein Conference 2013, Tübingen, Germany, September 24 – 27. 2013 more… BibTeX Full text (mediaTUM)
- Enhancing Object Recognition for Humanoid Robots through Time-Awareness. IEEE-RAS International Conference on Humanoid Robots, 2013 more… BibTeX Full text (mediaTUM)
- A Practical Approach to Generalized Hierarchical Task Specification for Indirect Force Controlled Robots. IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013 more… BibTeX Full text (mediaTUM)
- Qualitative Adaptive Reward Learning with Success Failure Maps: Applied to Humanoid Robot Walking. IEEE Transactions on Neural Networks and Learning Systems Volume: 24, Issue: 1, 2013, 81-93 more… BibTeX
- Enhancing Human Action Recognition through Spatio-temporal Feature Learning and Semantic Rules. IEEE-RAS International Conference on Humanoid Robots, 2013 more… BibTeX Full text (mediaTUM)
- Enhancing Human Action Recognition through Spatio-temporal Feature Learning and Semantic Rules. Humanoid Robots, 2013, 13th IEEE-RAS International Conference, 2013 more… BibTeX Full text (mediaTUM)
- Extracting Semantic Rules from Human Observations. 2013 IEEE International Conference on Robotics and Automation, May 6-10, 2013, 2013 ICRA'13 workshop: Semantics, Identification and Control of Robot-Human-Environment Interaction more… BibTeX Full text (mediaTUM)
- Extracting Semantic Rules from Human Observations. 2013 IEEE International Conference on Robotics and Automation, May 6-10, 2013, 2013 ICRA'13 workshop: Semantics, Identification and Control of Robot-Human-Environment Interaction more… BibTeX Full text (mediaTUM)
- A General Tactile Approach for Grasping Unknown Objects with a Humanoid Robot. 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2013 more… BibTeX Full text (mediaTUM)
- From a multi-modal intelligent cell to a self-organising robotic skin. IEEE International Conference on Robotics and Automation, 2013Workshop on Electronic Skin more… BibTeX Full text (mediaTUM)
- Directions Towards Effective Utilization of Tactile Skin - A Review. IEEE SENSORS JOURNAL, 2013, 2013 more… BibTeX
- Monitoring emotional states in the loop and its potential applications. Biomedical Signal Analysis Conference, Rio de Janeiro, Brazil, October 21 – 24, 2013 2013 more… BibTeX Full text (mediaTUM)
- Closed-loop Interaction with Affective Brain-Music Interface. Bernstein Conference on Computational Neuroscience 2013 more… BibTeX Full text (mediaTUM)
- Effects of 3D Shape and Texture on Gender Identification for a Retro-Projected Face Screen. International Journal of Social Robotics, Vol.5, Number 4, Vol. 5 Number 4 (Vol. 5 Number 4), 2013, pp.627-639 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
2012
- Forming Goal-directed Memory for Cognitive Development. Proceedings of Humanoids 2012 Workshop on Developmental Robotics: Can developmental robotics yield human-like cognitive abilities?, IEEE-RAS International Conference on Humanoid Robots, 2012 more… BibTeX Full text (mediaTUM)
- Automatic Face Replacement for a Humanoid Robot with 3D Face Shape Display. Proceedings of the 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), 2012, 469 - 474 more… BibTeX Full text (mediaTUM)
- Automatic Texture Generation for Face-Shaped Display from a Frontal Face Image. Proceedings of the Media Computing Conference 2012, Tokyo, Japan, June 23-34, 2012., 2012 more… BibTeX Full text (mediaTUM)
- Development of an integrated multi-modal communication robotic face. Proceedings of the 2012 IEEE International Workshop on Advanced Robotics and its Social Impacts (ARSO 2012), 2012, 101-102 more… BibTeX Full text (mediaTUM)
- "Mask-Bot 2i": An active customisable Robotic Head with Interchangeable Face. Proceedings of the 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012) , 2012, 520 - 525 more… BibTeX Full text (mediaTUM)
- Operating Unknown Constrained Mechanisms with Compliant Robots. ROBOTIK 2012, 2012 more… BibTeX Full text (mediaTUM)
- A Set-Point-Generator for Indirect-Force-Controlled Manipulators Operating Unknown Constrained Mechanisms. IROS 2012, 2012 more… BibTeX Full text (mediaTUM)
- Design and Emotional Expressiveness of Gertie (An Open Hardware Robotic Desk Lamp). RO-MAN: The 21st IEEE International Symposium on Robot and Human Interactive Communication, 2012, 1129 - 1134 more… BibTeX Full text (mediaTUM)
- Exploiting Past Success Failure for Effective and Robust Task Learning. Proceedings of the 5th International Conference on Cognitive Systems (CogSys2012), 2012, poster No.81 more… BibTeX Full text (mediaTUM)
- Cognitive Development Through a Neurologically-Based Learning Framework. International Conference on Humanoid Robots, 2012Workshop on Developmental Robotics more… BibTeX Full text (mediaTUM)
- IEEE/RSJ International Conference on Intelligent Robots and Systems3D Surface Reconstruction for Robotic Body Parts with Artificial Skins. IEEE/RSJ International Conference on Intelligent Robots and Systems , 2012 more… BibTeX Full text (mediaTUM)
- Integrating Discrete Normal Force Cells into Multi-modal Artificial Skin. 12th IEEE-RAS International Conference on Humanoid Robots , 2012 more… BibTeX Full text (mediaTUM)
- Open-loop Self-calibration of Articulated Robots with Artificial Skins. IEEE International Conference on Robotics and Automation, 2012, 4539-4545P. Mittendorfer and G. Cheng, pp.145-149, May 2012 2012 IEEE International Conference on Robotics and Automation P. Mittendorfer and G. Cheng, pp.145-149, May 2012 2012 IEEE International Conference on Robotics and Automation more… BibTeX Full text (mediaTUM)
- Uniform Cellular Design of Artificial Robotic Skin. 7th German Conference on Robotics, 2012, 145-149 more… BibTeX Full text (mediaTUM)
- Maskbot as a communication interface. Proceedings of the 5th International Conference on Cognitive Systems (CogSys2012), Vienna, Austria, Feb 22-23, 2012., 2012, 50 more… BibTeX Full text (mediaTUM)
- Gender identification Bias Induced with Texture Images on a Life Size Retro-Projected Face Screen. Proceedings of the 21st IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2012), Paris, France,, 2012, 43 - 48 more… BibTeX Full text (mediaTUM)
- How do we think machines think? An fMRI study of alleged competition with an artificial intelligence. Frontiers in human neuroscience 6, 2012 more… BibTeX
2011
- Accelerometer based robotic Joint Orientation Estimation. 11th IEEE-RAS International Conference on Humanoid Robots, 2011, 67-74 more… BibTeX Full text (mediaTUM)
- Experience-based Learning Mechanism with a Concept of Vigilance. BC11: Computational Neuroscience & Neurotechnology Bernstein Conference & Neurex Annual Meeting, October 4-6, 2011, 2011 more… BibTeX Full text (mediaTUM)
- Bipedal Locomotion Control with Rhythmic Neural Circuits. International workshop on Bio-Inspired Robots (BionicRobotsWorkshop 2011), 2011 more… BibTeX Full text (mediaTUM)
- Humanoid Multi-Modal Tactile Sensing Modules. IEEE TRO - Special Issue on Robotic Sense of Touch , 2011, 401-410 more… BibTeX Full text (mediaTUM)
- Self-Organizing Sensory-Motor Map for Low-Level Touch Reactions. 11th IEEE-RAS International Conference on Humanoid Robots, 2011, 59-66 more… BibTeX Full text (mediaTUM)
- Humanoid Multi-Modal Tactile Sensing Modules. IEEE Transactions on Robotics (T-RO), Volume: 27, Issue:3, 401 - 410, 2011 more… BibTeX Full text (mediaTUM)
- High performance integrated electro-hydraulic actuator for robotics – Part I: Principle, prototype design and first experiments. Sensors and Actuators A: Physical, (Issue 1), 2011, Pages 115-123 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- High performance Integrated Electro-Hydraulic Actuator for robotics. Part II: Theoretical modelling, simulation, control & comparison with real measurements. Sensors and Actuators A: Physical, Volume 169 (Issue 1), 2011, 124-132 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- `Mask-bot''- a life-size talking head animated robot for AV speech and human-robot communication research. Proceedings of the International Conference on Auditory-Visual Speech Processing (AVSP 2011), 2011, 111-116 more… BibTeX Full text (mediaTUM)
- mask-bot: a life-size robot head using talking head animation for human-robot communication. Humanoids 2011, 2011, pp.99–104 more… BibTeX Full text (mediaTUM)
2010
- A Control Strategy for Operating Unknown Constrained Mechanisms. IEEE International Conference on Robotics and Automation. Anchorage, USA. , 2010 more… BibTeX Full text (mediaTUM)
- Prediction of action outcomes using an object model. 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2010, 1708-1713 more… BibTeX Full text (mediaTUM)
- Adaptive Locomotive Behaviors of a Biped Robot: Patterns Generation and Classification. SIMULATION OF ADAPTIVE BEHAVIOR (SAB'10), 2010 more… BibTeX Full text (mediaTUM)
2009
2008
- Learning CPG-based biped locomotion with a policy gradient method: Application to a humanoid robot. The International Journal of Robotics Research 2 (27), 2008, 213-228 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Making object learning and recognition an active process. International Journal of Humanoid Robotics 5 (02), 2008, 267-286 more… BibTeX Full text (mediaTUM)
- A biologically inspired biped locomotion strategy for humanoid robots: Modulation of sinusoidal patterns by a coupled oscillator model. IEEE Transactions on Robotics, IEEE Transactions on Robotics, 2008, 185-191 more… BibTeX Full text (mediaTUM)
- Inverse kinematics with floating base and constraints for full body humanoid robot control. Humanoids 2008-8th IEEE-RAS International Conference on Humanoid Robots, 2008, 22-27 more… BibTeX
- From self-observation to imitation: Visuomotor association on a robotic hand. Brain research bulletin 75 (6), 2008, 775-784 more… BibTeX Full text (mediaTUM)
2007
- CB: A humanoid research platform for exploring neuroscience. Advanced Robotics 10 (21), 2007, 1097-1114 more… BibTeX Full text (mediaTUM)
- Disturbance rejection for biped humanoids. 2007 IEEE International Conference on Robotics and Automation, 2007, 2668-2675 more… BibTeX Full text (mediaTUM)
- Full-body compliant human–humanoid interaction: balancing in the presence of unknown external forces. IEEE Transactions on Robotics 5 (23), 2007 more… BibTeX Full text (mediaTUM)
- Real-time acoustic source localization in noisy environments for human-robot multimodal interaction. RO-MAN 2007-The 16th IEEE International Symposium on Robot and Human Interactive Communication, IEEE, 2007, 393-398 more… BibTeX Full text (mediaTUM)
2006
- Foveated vision systems with two cameras per eye. Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006., 2006, 3457-3462 more… BibTeX Full text (mediaTUM)
- Learning similar tasks from observation and practice. 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, 2006, 2677-2683 more… BibTeX Full text (mediaTUM)
- Modulation of simple sinusoidal patterns by a coupled oscillator model for biped walking. ICRA 2006, 2006Proceedings 2006 IEEE International Conference on Robotics and Automation, 2006. ICRA 2006., 1579-1584 more… BibTeX Full text (mediaTUM)
- Gravity compensation and full-body balancing for humanoid robots. 2006 6th IEEE-RAS International Conference on Humanoid Robots, IEEE, 2006, 214-221 more… BibTeX
- Passivity-based full-body force control for humanoids and application to dynamic balancing and locomotion. 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2006, 4915-4922 more… BibTeX Full text (mediaTUM)
- Unconstrained real-time markerless hand tracking for humanoid interaction. 2006 6th IEEE-RAS International Conference on Humanoid Robots, IEEE, 2006, 88-93 more… BibTeX Full text (mediaTUM)
2005
- Distributed visual attention on a humanoid robot. 5th IEEE-RAS International Conference on Humanoid Robots, 2005., 2005, 381-386 more… BibTeX Full text (mediaTUM)
- Learning cpg sensory feedback with policy gradient for biped locomotion for a full-body humanoid. Proceedings of the Twentieth National Conference on Artificial Intelligence, Menlo Park, CA; Cambridge, MA; London; AAAI Press; MIT Press, 2005 more… BibTeX
- Human–humanoid interaction: is a humanoid robot perceived as a human? International Journal of Humanoid Robotics 2 (04), 2005, 537-559 more… BibTeX Full text (mediaTUM)
- Experimental studies of a neural oscillator for biped locomotion with QRIO. Proceedings of the 2005 IEEE international conference on robotics and automation, 2005, 596-602 more… BibTeX Full text (mediaTUM)
- Poincare-map-based reinforcement learning for biped walking. Proceedings of the 2005 IEEE International Conference on Robotics and Automation, 2005, 2381-2386 more… BibTeX Full text (mediaTUM)
- Motor interference between humans and humanoid robots: Effect of biological and artificial motion. Proceedings. The 4th International Conference on Development and Learning, 2005, 2005, 96-101 more… BibTeX Full text (mediaTUM)
2004
- Discovering optimal imitation strategies. Robotics and autonomous systems 2-3 (47), 2004, 69-77 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- Learning to act from observation and practice. International Journal of Humanoid Robotics (1/04), 2004, 585-611 more… BibTeX Full text (mediaTUM)
- Learning tasks from observation and practice. Robotics and Autonomous Systems 47 (2-3), 2004, 163-169 more… BibTeX Full text ( DOI ) Full text (mediaTUM)
- An empirical exploration of a neural oscillator for biped locomotion control. International Conference on Robotics and Automation, 2004. Proceedings. ICRA'04. 2004, 2004, 3036-3042 more… BibTeX Full text (mediaTUM)
- A simple reinforcement learning algorithm for biped walking. IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA'04. 2004, 2004, 3030-3035 more… BibTeX Full text (mediaTUM)
- Learning from demonstration and adaptation of biped locomotion. Robotics and autonomous systems 47 (2-3), 2004, 79-91 more… BibTeX Full text (mediaTUM)
- A framework for learning biped locomotion with dynamical movement primitives. 4th IEEE/RAS International Conference on Humanoid Robots, 2004, IEEE, 2004, 925-940 more… BibTeX Full text (mediaTUM)
- A full body human motion capture system using particle filtering and on-the-fly edge detection. 4th IEEE/RAS International Conference on Humanoid Robots, 2004., IEEE, 2004, 941-959 more… BibTeX Full text (mediaTUM)
2003
2002
- Humanoid robot learning and game playing using PC-based vision. IEEE/RSJ international conference on intelligent robots and systems, IEEE, 2002, 2449-2454 more… BibTeX Full text (mediaTUM)
2001
- Continuous humanoid interaction:: An integrated perspective—gaining adaptivity, redundancy, flexibility—in one. Robotics and Autonomous systems (37/2-3), 2001, 161-183 more… BibTeX Full text (mediaTUM)
- Supervised autonomy: A framework for human-robot systems development. Autonomous Robots 10 (3), 2001, 251-266 more… BibTeX Full text (mediaTUM)
2000
- Complex continuous meaningful humanoid interaction: A multi sensory-cue based approach. Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation., 2000, 2235-2242 more… BibTeX Full text (mediaTUM)
- Development of a biologically inspired real-time visual attention system. International Workshop on Biologically Motivated Computer Vision, 2000, 150-159 more… BibTeX
1998
- Experiments in realising cooperation between autonomous mobile robots. In: Experimental Robotics V. Lecture Notes in Control and Information Sciences. Springer, 1998, 609-620 more… BibTeX Full text ( DOI )
1996
- Real-time visual behaviours for navigating a mobile robot. Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems. IROS'96, 1996, 973-980 more… BibTeX Full text (mediaTUM)