Open Student Thesis Offers
When writing your thesis at TUM I6, please follow our thesis guidelines. A guide to writing good thesis can be found here. A collection of useful material for research can be found here.

KI.FABRIK (Bayerisches-Projekt): Future AI & Robotic Factory

1. Robotic Motion Planning/Manipulation [MA/SA/BA]:
- [🔥HOT!!!] Path Planning Algorithms via Open Motion Planning Library (OMPL)
- DARKO - Mobile Robot Manipulator Simulation and Trajectory Planning
- Visualization of the mobile robot manipulator for the DARKO project
If you are interested in one of the topics or would like to propose a topic on robot motion planning/manipulation, etc., please contact Liding Zhang (liding.zhang@tum.de).
2. Dual/Multi-Robot Collaboration for Cable Manipulation:
- Motion Planning and Collision Avoidance in Dual-arm Manipulation of Deformable Linear Objects
- Contact Estimation through Sensor Fusion
- [New!] Dexterous Teleoperation for Imitation Learning
- [New!] Learning LLM-based Task Planning for Multi-stage Manipulation
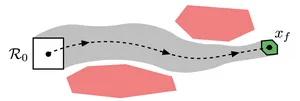
3. Obstacle Avoidance:
- Algorithms for Multiple Dynamic/Static Obstacle Avoidance
- Obstacle Avoidance Algorithms for Robotic Manipulators in Multi-Obstacle Environment
4. Knowledge Graphs with Foundation Models
5. Dynamics Learning:
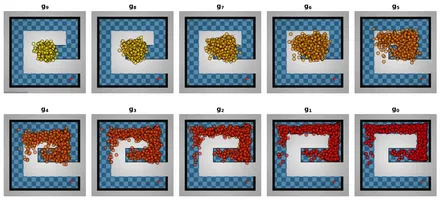
6. Image-Goal Navigation in Unstructured Environments (Underwater) via Deep Reinforcement Learning
7. Diffusion Policy on Dynamic Scenarios:
8. Robot Learning for Manipulation:
- [New! MA/FP] Active Perception based Robot Manipulation
- Fine-Tuning a Robot Foundation Model for Contact-rich Manipulation
- [New! FP] Reinforcement Learning based framework for contact rich manipulation of a musculoskeletal hand model
Mobile Construction Robots

The CoCoRo project is looking for students interested in gaining hands-on experience with construction robots.
[SA/MA] Behavior Modeling for an Autonomous Construction Robot using Behavior Trees
If you are interested in the topic or if you like to propose a topic regarding collaborative construction vehicles please contact Lukas Oehler (lukas.oehler@tum.de).
Lifelong Learning for Robotic Manipulation, Continual Reinforcement Learning

[BA/GR/SA/MA] Diffusion-based Continual Learning for Robotic Manipulation
[BA/GR/SA/MA] Robotic Continual Learning with Generative Replay for Long-horizon Tasks
In addition to these topics, we also offer other related fundamental research and platform development projects. We are actively expanding toward more complex robotic manipulation scenarios, developing robust continual learning algorithms for robotics, and deploying them on real-world robotic systems. This work includes many possible topics for exploration.
If you are interested in robotic continual learning, or would like to propose a related topic of your own, please contact Shimin Liu(shimin.liu@tum.de).
AI Agents with Language Models
We are looking for students in area LLM, VLM and AI Agents:
[SA/MA] Organizational Intelligence: Plug&Play Agents in AI Agent Networks New!
[SA/MA] Data confidentiality: Federated(-alike) Learning for AI-(Agents) New!
[SA/BA/MA] Combing Domain Expert AI and General Usage AI in Industrial Environment New!
[SA/MA] Self-Evolving Agentic AI New!
[SA/MA] Job Shop Scheduling with HPC
[SA/MA] LLM Alignment: Behavior Steering of LLMs (Reserved)
[SA/MA] AI Agents for Computer Games (Reserved)
[SA/MA/BA] Other related topics are also welcome.
If you are interested in one of the topics or if you like to propose a topic, please contact Fengjunjie Pan (f.pan@tum.de).
Autonomous Driving: Perception and Safety
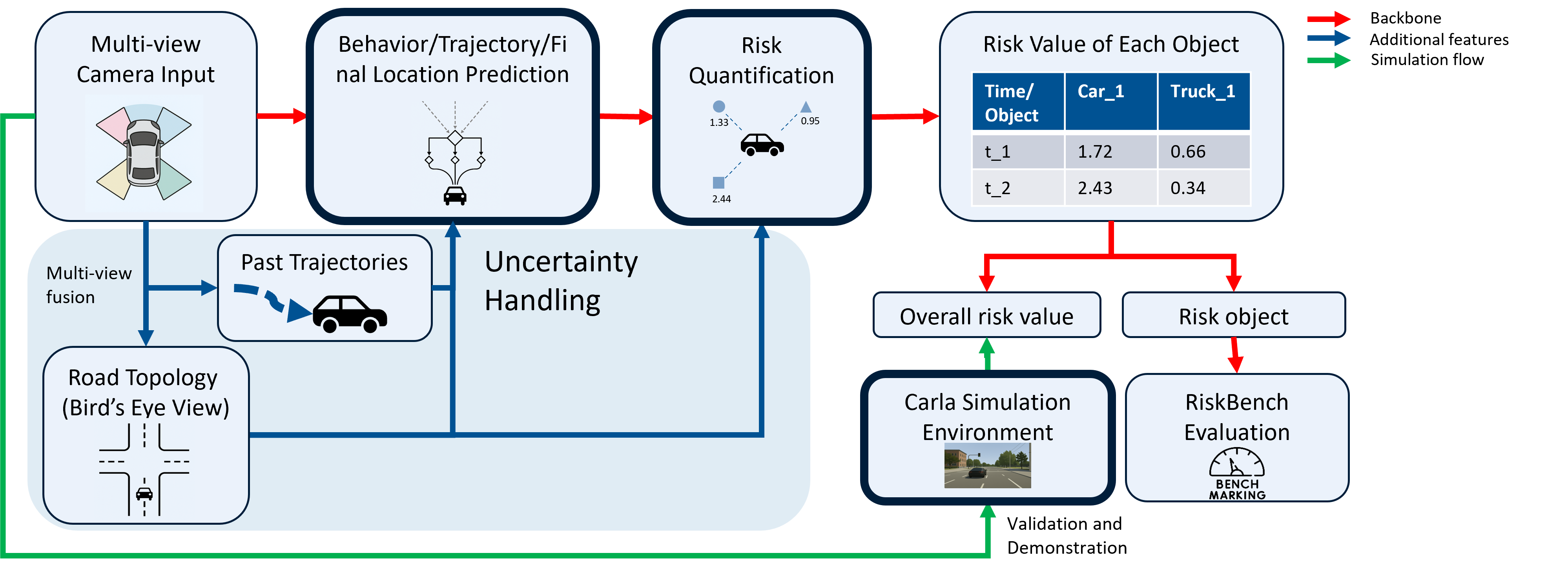
We are looking for students interested in implementing perception and risk-based safety models in autonomous driving vehicles, including a pipeline of perception/prediction, scenario risk quantification, and integration to planning algorithms.
[GR/FP/IDP/SA/BA/MA/etc.] Unified Perception and Prediction Module for Autonomous Driving Perception
[GR/FP/IDP/SA/BA/MA/etc.] Applicable Risk Quantification in Autonomous Driving Motion Planning
If you are interested in the topics or have any other ideas about autonomous driving, please contact Yingjie Xu (yingjie.xu@tum.de).
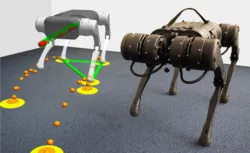
Whisker-Inspired Tactile Sensor and Biomimetic Mouse Robot
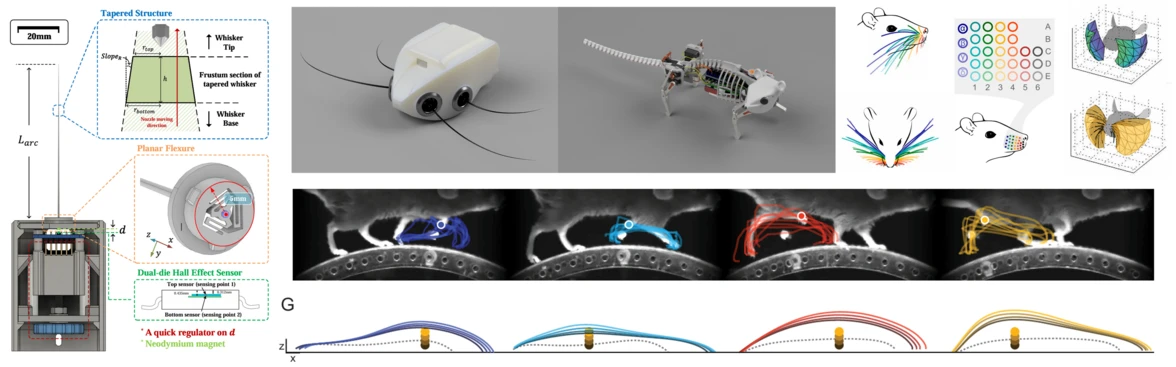
We aim to design and fabricate a whisker-inspired tactile sensor to enable exteroceptive sensing for a biomimetic mouse robot. Owing to its mechanical flexibility and low computational cost, the whisker sensor is ideally suited for assisting the biomimetic mouse robot in navigating confined, poorly lit, and unstructured environments. Ultimately, this sensor will be integrated into the mouse robot to build a contact-aware locomotion adaptation and tactile SLAM system, serving to enhance both the robot's environmental awareness and its reactive agility during operation. For more information, please directly contact Yixuan Dang.
Fundamental Algorithm Design: Dynamic Contact Estimate on Whisker-Inspired Tactile Sensor
- [MA|SA|BA] Enhanced Tip Contact Stability on Unknown Surface with Tactile Servoing and Customized Sensory Pattern
- [MA|SA|BA] Continuous Tangential Contact Localization based on Robot Proprioception, Whisker Physical Nature and Deep Learning
Sensor and Hardware Integration: Exteroception with Whiskers Integration on Biomimetic Mouse Robot
- [MA|SA|BA] A Magnetically Transduced Whisker Sensor Array with Heterogeneous Morphologies
- [MA|SA|BA] [Priority] Sensing In Darkness: Design of a Whisker-based Ultra-Compact Exteroception Head Module for Mice Robot
- Keypoint 1: Verification on Sensing Resolution and Real-time among Other Non-intrusive Proximity Sensor
- Keypoint 2: Improvement of Biomimicy Morphology and Sensory Array Density
- Keypoint 3: Sniffing - An Active Tactile Perception of Rat-like Motion in Poximity
- Keypoint 4: Tactile-Visual System based on Whisker Sensory Array and Multizone Ranging Sensor
Application Scenario: Contact-aware Locomotion Adaptation, Bio-inspired Navigation and Tactile SLAM
- [MA|SA|BA] [Priority] Enhanced 2D Leg Structure With Probabilistic Contact State Estimation on Foothold
- [MA|SA|BA] [Priority] Contact-Aware Locomotion Adaptation for Agile Biomimetic Mouse Robots
- Keypoint 1: Tactile-informed Vertical Obstacle Negotiation and Multimodal Motion Control for Mouse Robot
- Keypoint 2: A Hierarchical Coarse-to-fine Geometric Representation for Whisker Tactile Sensing
Autonomous Driving, Robotic Grasping, and Dense Prediction (Seeking outstanding students all the time!)
The general research focus is as follows:
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 1: Robotic grasp pose estimation (4D and 6D, Large language model(LLM), Vision language model(VLM), Diffusion policy, Flow matching, Reinforcement Learning, VLA).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 2: Multi-modal or multi-sensor fusion (RGB+Thermal, RGB+LiDAR, RGB+Depth, RGB+Event) for robust object perception (2D/3D detection, Segmentation).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 3: LLM for safety-critical scenario generation for autonomous driving (AGI, World model, Code generation).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 4: End-to-end autonomous driving (Planing, Trajectory prediction, Behavioral intention prediction (BIP), BIP-aware trajectory prediction).
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 5: Medical image segmentation.
- [GR/FP/IDP/SA/BA/MA/etc.] Topic 6: Point Cloud Registration, Absolute Pose Estimation, Vanishing Point Estimation in the Manhattan World, PnP, PnL (Robust localization in dynamic/uncertain environments).
If you are interested in these research topics, please send me an email with your CV and transcript of records. We also have several other open topics in robotics and welcome proposals or ideas from your side. For more information, please contact Dr. rer. nat. Hu Cao.

Exploring Extreme Grasping in Cluttered Environments

- [MA/BA/SA] Robot Grasping in Cluttered Environment
We are always looking for motivated students to join our research efforts. Current openings for theses and projects focus on Vision-Language Models (VLMs) in manipulation tasks. If you are interested in this field, or would like to propose a novel research direction, please reach out via email with your CV and transcripts.
Please contact tianyao.tong@tum.de
Robot Learning and VLA for Robotic Manipulation
We are looking for students interested in foundation models and VLA.
[SA/BA/MA] Real-to-Sim-to-Real for Scaling Robot Learning
If you are interested in on of the topics or if you like to propose a topic regarding Robot Learning and VLA, please contact Hang Li (hang1.li@tum.de) and Dr. Zhenshan Bing ( zhenshan.bing@tum.de).
DeepSLAM: Deep Learning based Localization and Mapping (Vision-based Perception and Navigation)
If you are interested in one of the topics, please contact Xiang Gao (xiang.gao@tum.de)
Large Vision Language Models in Autonomous Driving and Intelligent Traffic Infrastructure

We are looking for self-motivated students to work on generative AI and multi-modal large language models for autonomous driving and intelligent traffic infrastructure. The following topics are available.
- [MA/GR/BA] Visual Language Model in Autonomous Driving
[MA/GR/BA] World Models and Data Generation for 3D Traffic Environment Understanding
For more information and potenial open topicss, please contact Xingcheng Zhou.
Quadruped Robot Learning

Our research advances quadruped locomotion with a focus on its adaptivity, agility, and safety using state-of-the-art learning-based methods. We invite motivated students to join us. For more details on the topics below, or to learn about our most recent projects, please email your background to Yulong Xiao (yulong.xiao@tum.de).
Keywords: Quadruped locomotion, Reinforcement learning, Imitation learning
- [MA/GR/BA/SA] Learning Advanced Skills for Complex and Discrete Terrain
- [MA/GR/BA/SA] Differentiable Simulation for Efficient and Versatile Quadruped
Locomotion - [MA/GR/BA/SA] Safe Quadruped Locomotion: Out-of-distribution Detection and
Recovery - [MA/GR/BA/SA] Residual MPC: Blending Reinforcement Learning with GPU-Parallelized Model Predictive Control for Legged Robots
Bio-inspired Robotics in Complex Environments: Locomotion, Fault Tolerance, and Collaboration






1.Collaborative Underground Mapping for Cross-Scale Heterogeneous Robots
[BA/SA/MA]: [Proposal]
Underground environments pose significant challenges for autonomous mapping due to complex terrains, making single-robot coverage insufficient. To overcome this, cross-scale heterogeneous robot teams offer a promising solution by combining large robots for global localization and computing with small robots for exploring narrow, high-risk gaps. However, challenges like sensor fusion, communication limits, and payload constraints persist. This project proposes a mothership-child collaborative exploration system. The mothership acts as a centralized sensing and computing hub, guiding child robots that explore inaccessible areas. Ultimately, the project aims to develop a framework for efficient multi-robot cooperation and accurate map construction.
2.Locomotion of a Rat Robot with 3-DOF Legs in Curved and Narrow Spaces
[BA/SA/MA]: [Proposal]
Small-scale quadruped rat robots offer significant potential for exploring confined areas, but balancing a compact design with maneuverability remains a challenge. While traditional biomimetic spines require too much clearance for narrow spaces , a previously designed 3-DOF limb structure successfully optimized linear movement. However, how this structure handles complex turning is still untested. Because tight L-shaped or U-shaped tunnels impose strict turning radius limits , improving tight-turn passability and overcoming motion singularities—without sacrificing the robot's compact size—is essential for real-world applications.
3.Whole-Body Balance Control for Injured Quadrupedal Robots
[BA/SA/MA]: [Proposal]
Small-scale quadruped rat robots offer significant potential for exploring confined areas, but balancing a compact design with maneuverability remains a challenge. While traditional biomimetic spines require too much clearance for narrow spaces , a previously designed 3-DOF limb structure successfully optimized linear movement. However, how this structure handles complex turning is still untested. Because tight L-shaped or U-shaped tunnels impose strict turning radius limits , improving tight-turn passability and overcoming motion singularities—without sacrificing the robot's compact size—is essential for real-world applications.
4.Pathological Gait Generation for Injured Quadruped Robots Using Reinforcement Learning
[BA/SA/MA]: [Proposal]
While quadruped robots are highly adaptable, their complex architecture makes them susceptible to hardware failures like limb loss, which render standard control strategies ineffective. Preserving mobility requires generating a stable tripedal pathological gait, but coordinating the remaining limbs involves highly nonlinear constraints that are difficult for conventional model-based methods to handle. Reinforcement learning (RL) offers a solution by autonomously discovering compensatory coordination through simulation, providing a highly resilient approach for fault-tolerant control and gait generation under complex damage conditions.
5.Pathological gait generation for rat robot with spine-based damage control
[BA/SA/MA]: [Proposal]
Quadruped robots rely on precise foothold selection for mobility. However, irreparable limb failure disrupts this ability, causing asymmetric motion and severe issues with movement direction and dynamic balance. Consequently, damage control mechanisms are rarely applied to quadrupeds compared to hexapods. Inspired by animals that utilize their spines for movement direction and balance , this research explores damage control using a rat robot equipped with a flexible spine. The objective is to generate pathological gaits that enable the robot to maintain balance and continue task execution despite irreversible limb damage.
6.Design of a Wheel-Legged Rat Robot for Enhanced Mobility
[BA/SA/MA]: [Proposal]
While rat robots are ideal for exploring confined spaces, their small size inherently restricts their actuation, payload, and obstacle-clearing capabilities. Relying purely on legged locomotion often results in low speed, high energy consumption, and poor adaptability in mixed environments. To address this, converting rat robots into wheel-legged platforms offers a highly effective solution. This hybrid approach combines the speed and energy efficiency of wheeled motion on flat surfaces with the obstacle-negotiation advantages of legged systems, ultimately overcoming size-induced constraints and significantly enhancing the robot's robustness and practical utility.
Mentor: Yuhong Huang(yuhong.huang@tum.de) Qian Huang(qian.huang@tum.de)
CeCaS: Autonomous driving - Systems and Software Engineering
As part of the research project CeCaS, a group has come up to build a new system architecture for future vehicles
with a focus on autonomous driving.
Systems and Software Engineering
Our group provides a range of topics related to systems and software engineering with applications in robotics and automotive.
Currently, the following thesis proposals are open:
- [SA/MA] Job Shop Scheduling with HPC
- [SA/MA/BA] Designing an Amphibious Vehicle: A Prototype Trial Using 3D Printing.
- [SA/MA] 3DGS-based SLAM in Dynamic Systems: Improving Dynamic Object Filtering and Efficiency.
- [SA/MA] 6-DOF Grasp Planning using Transformer-based Neural Networks.
- [MA] Performance study on transporting large-scale dataset.
- [MA] Multi-robot cooperation under signal temporal logic
- [SA/MA]Field Robotics - Autonomous Driving in Unstrutured Scenarios
- [SA/MA]Field Robotics - Autonomous Driving in Smart Mining
- [SA/MA]Field Robotics - Space Robotics
Reinforcement Learning, Representation Learning, Meta-RL and Robotics

Three of our DEMOs can be found at https://sites.google.com/view/kuka-environment/ , https://sites.google.com/view/cemrl, and https://videoviewsite.wixsite.com/rlsnake.
- Meta-RL:
- RL:
- Language-conditioned Meta-RL:
- Safety Control for Robotic Manipulator
We have several other open topics in the domain of reinforcement learning in robotics and we also accept open proposals or ideas with yourselves. For more information, please contact Zhenshan Bing.
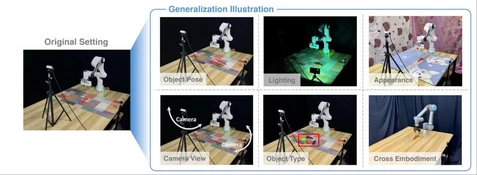
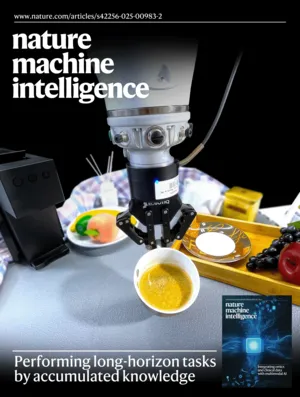
Humanoid manipulation, Lifelong learning, Cross-embodiment transfer learning


1. Cross-Embodiment Lifelong Transfer Learning
The demo and recent publication on Nature Machine Intelligence related to this topic can be seen at: https://www.nature.com/articles/s42256-025-00983-2
[BA/MA]: Cross-embodiment lifelong learning leveraging common knowledge representation and continual world model (contact: y.meng(at)tum.de)
In the process of lifelong learning for robots, cross-embodiment knowledge transfer and reuse are often overlooked. This leads to overfitting to specific dynamic embodiments and a lack of generalization. However, embodiments with similar dynamic characteristics hold the potential for direct task knowledge transfer and generalization. Therefore, this project focuses on cross-embodiment knowledge co-representation and transfer during lifelong learning. We propose to use a Mixture of Experts (MoE) architecture to align the inputs and outputs of different embodiments and to construct a shared representation in the latent space. At the same time, we will incorporate a world model to enable the latent space to predict states independent of specific dynamics, aiming to improve the cross-embodiment transfer performance in lifelong learning.
Keywords: Lifelong Reinforcement Learning, Cross-Embodiment, Shared Latent Representation, Transformer, Mixtrue of Experts, Generative Experience Replay, Diffusion Modeling
2. Large Language Models Empowered Humanoid Manipulation
[BA/MA]: LLM-Based Code Generation Framework for Humanoid Dual-Arm Manipulation (contact: y.meng(at)tum.de)
Large language models (LLMs) have shown strong potential for generating executable robotic code, enabling flexible task specification and rapid deployment. However, applying LLM-based code generation to humanoid manipulation remains challenging due to the complexity of dual-arm coordination, dexterous manipulation, and perception in open-world environments. This thesis aims to develop a code generation framework for humanoid manipulation that bridges high-level task descriptions and low-level control through a structured set of modular APIs. The framework will support dual-arm collaborative manipulation, object grasping and handover, and perception-driven action planning using modern vision models such as YOLOv5 or SAM3-based segmentation. The student will contribute to the design of the framework architecture and implement core manipulation and perception APIs that can be reliably invoked by LLM-generated code. The project will be validated through an end-to-end humanoid manipulation demo, such as object handover, demonstrating the feasibility of LLM-driven code generation in open-world humanoid manipulation tasks.
keywords: Code Generation, Humanoid Manipulation
[BA/MA]: Vision-Language-Action Model with Humanoid DexHand Manipulation (contact: y.meng(at)tum.de)
Recent progress in Vision–Language–Action (VLA) models and embodied intelligence has brought the robotics community to what many consider the “pre-GPT moment” for robots. However, current VLA models face significant limitations. On the data side, most existing VLA datasets are designed for simple single-arm robots with two-finger grippers, while large-scale datasets for humanoid robots equipped with dexterous hands remain scarce. Meanwhile, internet-scale human videos, an abundant source of prior knowledge for robotic learning, are still underexplored. Correspondingly, existing VLA architectures are not well adapted to highly articulated humanoid robots with dexterous hands, which often involve more than 50 degrees of freedom. This thesis project proposes to leverage human interaction videos for world-model learning, combined with small-scale robot data for hierarchical VLA fine-tuning, to enable dexterous manipulation on humanoid robots. This is an open research topic, and students with strong academic performance (GPA<2.0) or prior research/publication experience are encouraged to apply. Outstanding students may have opportunities to co-author publications.
Keywords: Vision-Language-Action Models, Humanoid Manipulation, Dex Hand, Imitation Learning.
Applicants interest in above topics are expected to have:
- Proficiency in Python, Linux OS and a solid understanding of deep learning.
- Good English communication and academic writing skills.
- Good academic performance (GPA < 2.3).
- Availability for full-time work at least 6 months.
- Prior experience with reinforcement learning/ imitation learning is highly desirable and will be considered an advantage.
Additionally, we have several ongoing projects and we also accept open proposals or ideas with yourselves. Students who achieve outstanding results will have the opportunity to publish papers with us as co-authors in international top-tier journals/conferences. We welcome interested students to reach out at any time: Yuan Meng
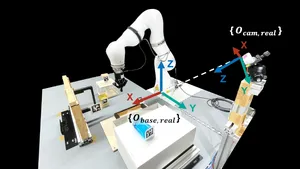
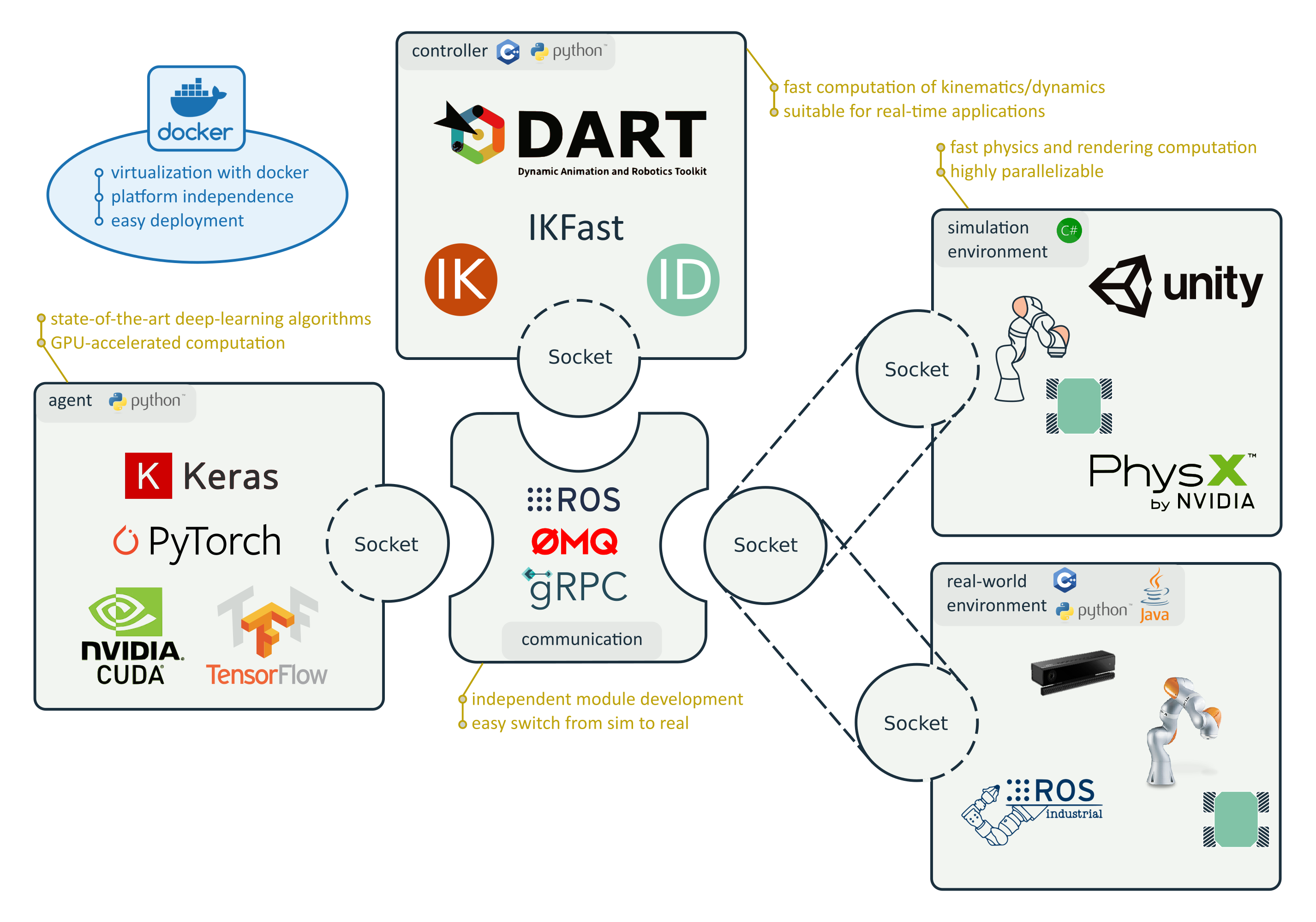
Simulation-Based Learning Control for Real-World Robotic Manipulation and Navigation
- [MA/GR/IDP] Reinforcement Learning for Tower Crane 3D Lift Control contact: Hossein Malmir
- [BA/MA/GR/IDP] Photorealistic Rendering and Simulation in Robotics with Unity contact: Josip Josifovski
- [BA/MA/GR/IDP] Comparative Sim2Real Path Planning for AGV Navigation contact: Hossein Malmir
For more information about other available topics in reinforcement learning, data-driven control, and sim2real transfer, please contact Hossein Malmir.
Model Predictive Control for Quadruped Robots
Neural SLAM and Biomimetic Rodent Robot
- [MA/BA] Design and Control of a Rat Robot with Actuated Spine and Ribs
- [MA/BA] Biologically Plausible Spatial Navigation (NeuralSLAM)
- [MA/BA] Brain-inspired Localization and Mapping based on LiDAR Sensor
- [MA/BA] Pathological gait generation for rat robot with spine-based damage control
- [MA/BA] Rewiring the CPG controller during rat robot error behaviors
For more information about this topic, please contact Zhenshan Bing and Florian Walter.
BMW - Source-Agnostic Cooperative Perception
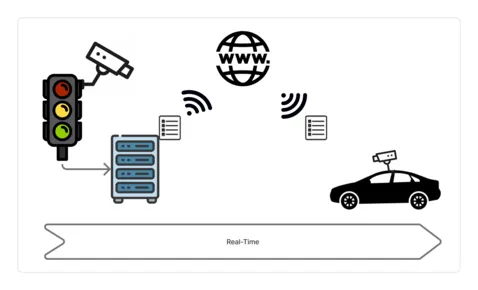
As part of the research project from BMW, our focus is on the real-time infrastructure of the V2X communication and sensor fusion.
- [MA/FP] Efficient Real Time V2X Data Transmission and Object Extraction
- [MA/FP] Object List Generation and Extraction for V2X Communication
For more information about this topic, please contact Kuo-Yi Chao.
HAL4SDV - Systems Safety Security Software
HAL4SDV, or the Hardware Abstraction Layer for Software-Defined Vehicles, is a European research initiative aimed at revolutionizing the automotive industry by developing a standardized hardware-software integration framework.
This project supports the transition to Software-Defined Vehicles (SDVs), where software plays a central role in vehicle functionality, allowing for over-the-air updates, modular design, and enhanced customization.
Key goals of HAL4SDV include:
- Creating a unified interface between vehicle hardware and software to simplify development processes.
- Enabling faster deployment of new features and ensuring high safety and performance standards.
- Supporting both safety-critical and general-purpose vehicle applications.
- Enhancing collaboration across European countries to build a comprehensive SDV ecosystem.
We are looking for eager and motivated students to work on the following topics:
Application of Retrieval-Augmented Generation (RAG) Systems in Standard Compliance
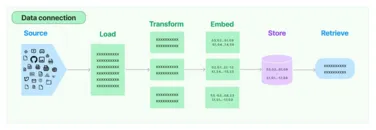
We are looking for a self-motivated student to work on extracting test scenario for autonomous driving research using RAG system:
- [GR/FP/IDP/SA/BA/MA/etc.] Comparison of Retrieval-Augmented Generation (RAG) Systems for Extracting Test Scenarios from UN Regulations
We have other open topics in the domain of Large Language Models in autonomous driving software development and we also accept open proposals or ideas with yourselves. For more information, please contact Vahid Zolfaghari.
Spiking Neural Networks - Next Generation AI for Autonomous Driving

At the KI-ASIC project we are researching about the application of bio-inspired neural networks to real-world applications.
If you are interested in learning about neuroscience and how neuromorphic engineering is trying to narrow the gap between biology an technology, do not hesitate to contact us.
Available:
Previous topics:
Reinforcement Learning with Diffusion Models
There are a few simulation oriented Bachelor and Master thesis in the following topics. If you are interested, feel free to contact us at erdi.sayar@tum.de
Cyber-Physical Systems

Cyber-physical systems — physical devices, enhanced by computational algorithms, that interact with their environment — are pervasive in today's society. Applications include autonomous driving, surgical robots, power grids, space exploration, and many more. All these use cases are safety-critical, as failures can cause severe economic and ecologic damages. At the Cyber Physical Systems Group, we develop methods to provably guarantee safe operation of these systems during deployment. We offer thesis topics in the following areas:
- Autonomous Vehicles
- Modular Robotics
- Safe & Multi-Agent & Offline Reinforcement Learning
- Robust and Nonlinear Motion Planning & Control
- Machine Learning and Optimization
- Formal Methods and Reachability Analysis
- Mobile Robotics for Construction Tasks
Please check our website for an up-to-date list of open topics.
Deep Learning for Computer Vision


If you are interested in researching trending topics in the field of computer vision and pattern recognition:
- Object detection
- Segmentation
- Tracking
- Surface reconstruction
- Mesh generation
- Text-to-image generation
- Domain adaptation of synthetic data
then please contact: Bare Luka Žagar
Formal Methods and Reachability Analysis
- [BA or MA] Data-driven Identification of Uncertainty Sets for Autonomous Systems
- [BA or MA] Uniform Trajectory Planning for Cyber-Physical Systems
- [BA or MA] Optimization-based Verification of Cyber-Physical Systems
- [MA] Ensuring Safety of Large-Scale Structures
- [MA] Exploiting Mixed-Monotonicity in Reachability Analysis
- [MA] Errors of Trajectories for Autonomous Vehicles and Cyber-Physical Systems
Offline Reinforcement Learning
Safe Reinforcement Learning, Multi-Agent Reinforcement Learning
Reinforcement Learning for Safe and Efficient Combustion Engine Control
Neurorobotics in the Human Brain Project
- Developmental Body Modeling in Soft Robotics
- Cloud-Based Robotics for Machine Learning
- Virtual Neurorobotics with Intel Loihi
- Spiking Compliant Robot Control with Intel Loihi
- Integration of the Neural Simulator NEST into the Neurorobotics Platform
- Deep Spiking Q-Networks
- Autonomous Locomotion Control for Snake Robot Based on Bio inspired Vision Sensor and Spiking Neural Network
- Advanced Autonomous Driving Control Based on Bio inspired Vision Sensor and Spiking Neural Network
- Spiking Neural Network for Autonomous Navigation based on LiDAR Sensor
- Deep Spiking Reinforcement Learning
- Learning adaptive target reaching with Recurrent Neural Networks
- Biologically-inspired Perception for Autonomous Vehicles based on LiDAR Sensor
Machine Learning Algorithms for Hybrid Vehicle Data
Please see this page for the available topics about 3D Object Detection and Tracking.
Autonomous Robot & Visual Servo & Deep Learning & Robot Design & Medical Robotics
For more information, please visit my homepage Mingchuan Zhou or contact me via email (zhoum@in.tum.de).
OSBORNE (Future Automotive E/E Architectures for Autonomous Cars)
We have a set of open topics in the domain of affective computing and multimodal emotion recognition, within the context of OSBORNE project, for more information please contact Sina.
HORSE / REMODEL
We have several open topics related to computer vision in the HORSE and REMODEL projects. Please contact Arne for more details.
Collaboration with Chair for Product Development and Lightweight Design
External thesis proposals
- Masterthesis – Grey-Box Modellierung und Validierung des Motoraufheizverhaltens auf dem Rollenprüfstand und im Fahrzeug mittels Machine Learning
- [Master Thesis or Working Student] LLM for robotics with multi-fingered hand (Agile Robots AG)
Robot learning for Dexterous Hands
Sim2real transfer with Scaling up Diffusion/Flow matching Policies for Dexterous Manipulation
Low-level vision
For more information, please visit my homepage (Yuning Cui) or contact me via email (yuning.cui@in.tum.de).