Our mission
Our primary missions are research and education with a focus on machine perception, cognition, action and control.
Research areas
Cyber-Physical / Embedded Systems
These systems are investigated with special emphasis on fault tolerance and high availability; special topics are the design of very small redundant systems and the associated software development models and tool chains.
Human-Robot Interaction and Service Robotics
This includes work on the integration of speech, language, vision and action; programming service robots; development of new application scenarios for sensor-based service robots; robot systems for education.
Cognitive Robotics
This field encompasses a comprehensive area of topics ranging from sensor models by the way of individual sensor processing entities (e.g. for high-speed face tracking) to high-level cognitive skills for navigation, adaptation, learning.
Medical Robotics
This topic covers all aspects of manipulator and instrument control for complex surgical procedures, e.g. visualisation of all types of patient data, haptic feedback for delicate handling, skill transfer, shared control, multi-manipulator cooperation.
Recent featured publications
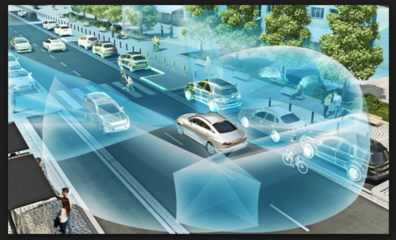
- Song, Rui; Liang, Chenwei; Cao, Hu; Yan, Zhiran; Zimmer, Walter; Gross, Markus; Festag, Andreas; and Knoll, Alois: Collaborative semantic occupancy prediction with hybrid feature fusion in connected automated vehicles. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 17996-18006. 2024.
- Zimmer, Walter; Wardana, Gerhard Arya; Sritharan, Suren, Zhou, Xingcheng; Song, Rui and Knoll, Alois. "Tumtraf v2x cooperative perception dataset." In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pp. 22668-22677. 2024.
- Bing, Zhenshan; Rohregger, Alex; Walter, Florian; Huang, Yuhong; Lucas, Peer; Morin, Fabrice O.; Huang, Kai and Knoll, Alois: Lateral flexion of a compliant spine improves motor performance in a bioinspired mouse robot. Science Robotics 8 (85), 2023, eadg7165
- Zimmer, Walter; Creß, Christian; Nguyen, Huu Tung; Knoll and Alois: TUMTraf Intersection Dataset: All You Need for Urban 3D Camera-LiDAR Roadside Perception . The 26th IEEE International Conference on Intelligent Transportation Systems (ITSC 2023). (Best Student Paper Award)
Studies at the Chair
Our goals for teaching are to provide robotics and computer science literacy to a broad spectrum of students, starting from high school students to whom we offer our exciting education and entertainment robotics activities. We also offer a Master's Degree in Robotics, Cognition, Intelligence.
In more detail, our courses include:

Undergraduate Education:
Introduction to Computer Science I and II, seminars on different topics, related exercises, labs.
Graduate Education:
Robotics, Real-time Systems, Machine Learning, Computer Vision, Digital Signal Processing, and more.
Ph.D. Programs:
There is a multitude of opportunities for students to pursue degrees, in funded programs and on regular staff positions.
Research Projects
Recent featured projects



Projects we coordinated or participated in
The Human Brain Project HBP
The European Flagship project on Brain Research
Neurorobotics in the HBP
The Neurorobotics Subproject in the Human Brain Project
ECHORD++ project
The European Coordination Hub for Open Robotics Development
ECHORD project
The European Clearing House on Open Robotics Development
CoTeSys
Cognition for Technical Systems
Graduate School of Information Science in Health
Top level education for information in science in health
INI.TUM
The "Ingolstadt Institute der TU München" is a cooperation between AUDI AG, Technische Universität München and Ingolstadt
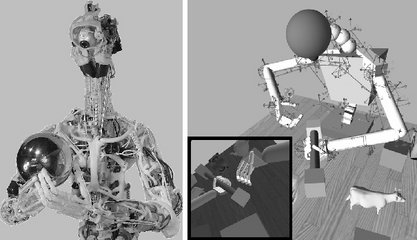
ECCEROBOT
The project "Embodied Cognition in a Compliantly Engineered ROBOT" developed a completely new type of robot
SHOP4CF
Smart Human Oriented Platform for Connected Factories
AI4DI project
Artificial Intelligence for Digitising Industry
MYOROBOTICS
The project "Myorobotics" develops soft modular robots
Neuro-IT.net
A former network of excellence at the interface between robotics and neuroscience
JAHIR project
Joint-Action for Humans and Industrial Robots
Neurovers-IT
A project to develop "in vitro neuronal networks" as a novel class of "computational device"

Website Archive
The chair's website from 2001 - 2018 can be accessed in an archived version at https://archive.air.in.tum.de/. The page will not be updated anymore but contains information about research, teaching, staff and many other information during this period.
The latest website archive, from July 2022, is also accessible over at: http://archive22.air.in.tum.de/