ulTEAM@TUM
Welcome to ulTeam@TUM
The World Robot Challenge (WRC) is a robot competition which is part of the World Robot Summit (WRS). Teams from all over the world compete in 4 categories where use of robots is highly expected to happen.
Our team consists of members from the Chair for Cognitive Systems and the Machine Vision and Perception Group, department of Informatics, at the Technical University of Munich. We are applying to participate in the Partner Robot Challenge (Real Space). The competitors in this category have to tidy a room. The idea behind is to foster the collaboration between human and robot.
The subtasks include:
a) Tidy up the room where clothes, toys, plastic bottles, etc. are cluttered in a short time. It is important that the robot learns how to discard plastic bottles, how to handle laundry, etc. Technical focus is on: Semantic mapping, unknown object perception and manipulation, path planning, safe navigation, obstacle avoidance
b) Navigating to the next room while avoiding random obstacles lying on the floor. Technical focus is on: Safe navigation, Obstacle avoidance, path planning
c) Provide a person within a group with a drink from a shelf when requested. Technical focus is on: HRI, semantic mapping, object manipulation, motion, and path planning.
The robot used in the competition is the HRS.
The competition planned in 2020 was postponed due to the pandemic situation.

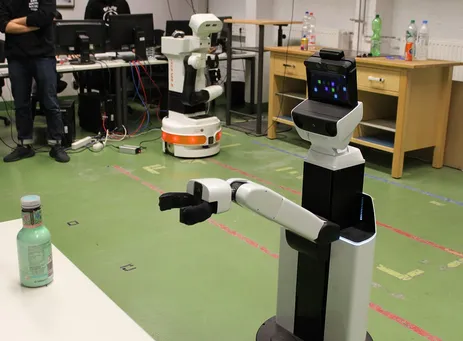
Solving the task
These pictures are from one of the first trial runs for solving a part of the Partner Robot Challenge. Here the robot has to tidy up a room. Detecting and grasping an object are the first steps in order to solve the whole task.

Supervisors
The supervisors of the team are:
Prof. Gordon Cheng, Chair for Cognitive Systems
Prof. Darius Burschka, Chair of Robotics, Artificial Intelligence and Real-time Systems
Julio Rogelio Guadarrama Olvera