Soft Exosuits
Contact: Dr. John Nassour
Wearable robotics is a promising new area of research, which aims to provide supports that can enhance human physical performance, and even help recover and regain lost limbs movement. Hence, such technology can offer the ability to enrich the quality of life of its wearers. Nonetheless, these devices need to be comfortable, especially for long-wearing duration, and efficient in supporting body mass as well as interactive to respond to arbitrary human movements. One of the critical challenges being, “How can robots be efficient and embedded inside what we wear at the same time?” Soft wearable robotics has several challenges, such as versatile soft actuators, accurate soft sensors, and efficient control algorithms.
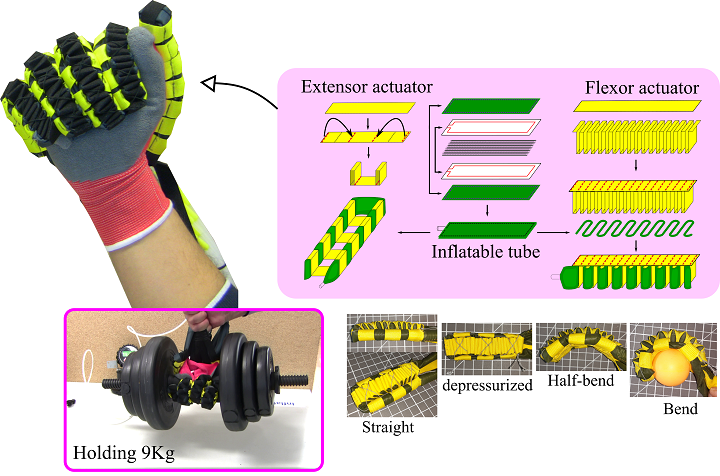
In our approach, we address the problem of building a generic textile-based actuator that can assist human movements at different scales (e.g., finger and elbow). The proposed actuator is made with different sizes to be used for different body joints in wearable robotic applications: actuation of fingers, elbow, etc. Each actuator is made of a single bladder tube wrapped in textile and enfolded inside textile parallel channels. Furthermore, the proposed actuator can yield high performance in holding heavy weights (a glove holding 9kg, and elbow-size flexor holding 20kg ). Our initial design of the soft actuator and the preliminary human experiments open a new perspective for different human-centered textile-based actuator designs.

Multi-sensory wearable exoskeletons
Contact: Natalia Paredes Acuna
The demand of physical therapy to support disabilities caused by neurological disorders has become an increasing challenge to public health systems. Robotic assistive devices like exoskeletons provide unique opportunities to support and improve motor capacity thanks to their capability of delivering therapy routines with high repetition, time, and intensity dosages. Clinical trials on some upper-limb exoskeletons have proven their effectiveness for areas such as neurorehabilitation therapy, however, the lack of portability and accessibility represents an obstacle to further study their rehabilitation benefits. To maximize the use frequency, exoskeletons need to be wearable, easy to use, and seeking to assess the user’s intentions through large multi-sensory modalities. These requirements lead to a big challenge: How can upper-limb rehabilitation exoskeletons achieve high control accuracy through multi-sensory modalities and yet be wearable?
Our approach focuses on exoskeletons that use artificial robot skin developed at ICS as a multi-sensory interface to achieve high control accuracy. The proximity, force, temperature, and acceleration sensors of the robot skin allow us to interact with the exoskeleton through a large area thanks to its efficient and flexible information handling. In this way, we aim to develop upper-limb wearable exoskeletons that target different symptoms resulting from neurological disorders, such as muscle weakness, spasticity, and cerebellar tremors.