Herbert: anthropometrically correct humanoid robot
Herbert is a robot fully developed at the ICS with respect to anthropometry (this is the study of sizes and proportions of the human body). This means that the robot is anthropometrically correct with the size and weight of a 1 percentile adult male. The limbs of the robot have a similar in length and the joint position are as close as possible to a real human.
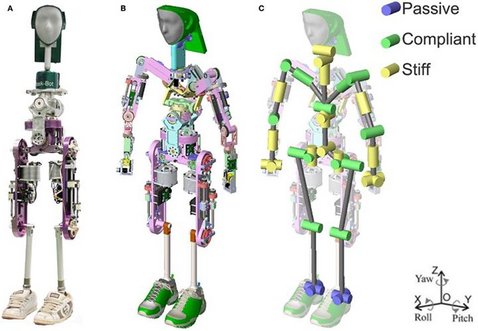
The new full-sized anthropometrically correct humanoid robot weights 35 kgs and has 33 DOFs: (1) 29 active DOFs (2 × 4 in the legs, 2 × 7 in the arms, 4 in the waist and 3 in the head) and (2) 4 passive DOFs (2 × 2 in the ankles).
A modular design for the overall mechanical structure was applied. Two core mechanical module types make up the main structural elements of Herbert: (1) small compact mechanical drive modules and (2) compliant mechanical drive modules. The electronic system of Herbert is based on two different types of motor control boards and an FPGA module with a central controller. The software architecture is based on ROS with a number of sub-nodes used for the controller. All these supporting components have been important in the development of the complete system.
A complete description is in the paper at Frontiers in Robotics and AI: journal.frontiersin.org/article/10.3389/frobt.2015.00014/full