Abnormal Motion Detection for Targeted Assistance
Researcher: Neha Das, Satoshi Endo
Motivation
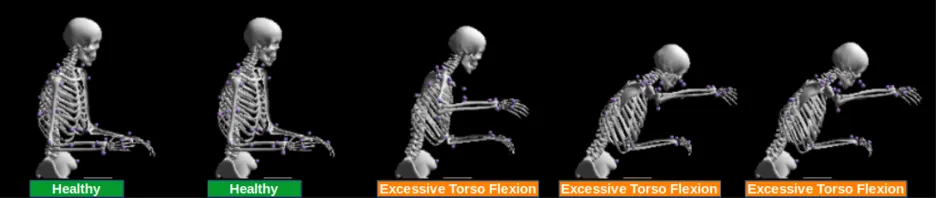
In rehabilitation, task success alone is not a sufficient indicator of progress. Patients with motor impairments, such as those recovering from stroke, often complete tasks by relying on compensatory strategies. Examples include excessive trunk lean or abnormal shoulder motion when distal control is impaired. While such strategies can temporarily enable movement, they can slow or even block recovery by reinforcing maladaptive motor patterns.
A rehabilitation system must therefore go beyond simple detection of abnormal movement. It must identify which joints contribute to the deviation, explain why the motion is suboptimal, and adapt assistance in a way that corrects the underlying problem. This allows the robotic system to provide not just generic help for completing the task but targeted, context‑specific intervention that guides the patient toward healthy movement patterns.
Research questions
- How can compensatory motion be detected and localised during the task across diverse movements and patient profiles
- How can the system interpret the underlying cause of abnormal motion in order to adapt the assistance strategy accordingly
- How can these capabilities be implemented within a real‑time, closed‑loop framework using interpretable and safe machine‑learning models suitable for rehabilitation
Approach
We have developed a detection‑to‑assistance pipeline that couples interpretable abnormal motion classification with adaptive robotic or FES‑based support.
- Sensing and modelling
Motion capture data and joint torque estimates are obtained from an upper‑body musculoskeletal model.
Joint‑level biomechanical metrics such as angular jerk, power, torque rate, and effort are calculated as energy‑based features, encoding both kinematic quality and dynamic effort. - Online abnormality detection
Lightweight linear classifiers are trained on sparsely labelled data to distinguish between healthy and compensatory motion.
Cumulative averaged energy features track the evolution of joint behaviour throughout the movement, improving robustness to transient variations. - Cause identification
Classifier weights are analysed at the joint level to determine which joints contribute most to the detected abnormality.
This allows the system to identify whether the problem is caused by over‑reliance on proximal joints, insufficient distal activation, or poor inter‑joint coordination. - Assistance adaptation
The identified cause is used to select or adjust the assistance policy.
For example, if the abnormality is due to insufficient distal activation, the system can increase FES or robotic assistance to distal joints while limiting proximal compensation.
If poor coordination is identified, guiding forces or haptic constraints can be introduced to promote correct joint coupling.
Assistance is updated continuously during the movement, forming a closed‑loop corrective strategy.
Key results and achievements
- Integration of detection and correction, linking abnormal movement recognition directly to targeted intervention.
- Real‑time operation, enabling classification and control updates as the movement unfolds.
- Interpretable decision‑making through the use of biomechanically meaningful features.
- Assistance that is optimised not only for completing the task but also for promoting healthy, recovery‑relevant joint usage.
By understanding both that a movement is incorrect and why it is incorrect, this approach turns abnormal motion detection into an active component of rehabilitation control. It enables adaptive assistance that directly targets the underlying motor deficit and supports the development of sustainable, healthy movement patterns.
Inferring intent during physical Human-Robot-Interaction
Researcher: Samuel Tesfazgi
Motivation
With recent advances in robotic technologies, lightweight robots are becoming more accessible and are increasingly being deployed in close proximity to humans. In order for humans and robots to cooperate effectively in previously unspecified contexts, the robotic partner needs the capacity to infer the intent of the human during tasks and adapt its behavior accordingly. One common approach to perform this intention estimation is the framework of inverse reinforcement learning (IRL), also referred to as inverse optimal control. However, methods based on this approach suffer from intrinsic optimality assumptions towards the observed agent, therefore, not generalizing well to suboptimal and learning agents. Our research efforts center around generalizing IRL frameworks for suboptimal agents, such as human with injuries or limited movement capabilities, by combining insights from control theory and data-driven learning methods.
Research questions
- Design of an inverse reinforcement learning algorithm based on suboptimal demonstrations
- Provide guaranteed bound for predicted intent and behavior
- Adaptation of inferred cost function for agents with time-varying control policies
Approach
We are currently designing a machine learning technique based on neural networks to model the agent’s behavior as a dynamical system which is analyzed using tools of nonlinear control.