Forschungsgebiete
Research Themes
Our research revolves around Cooperative Robotics, with novel techniques and knowledge developed through theoretical and fundamental research in several control-related research areas including human-centered control, networked control and data-driven control. In parallel, research and developments of bio-inspired design seek existing control solutions in biological systems using data-driven approaches to improve fundamentals of robotics technologies.

Data-driven Control
Research into how new control algorithms can be developed by blending control theoretical concepts and Gaussian Processes.
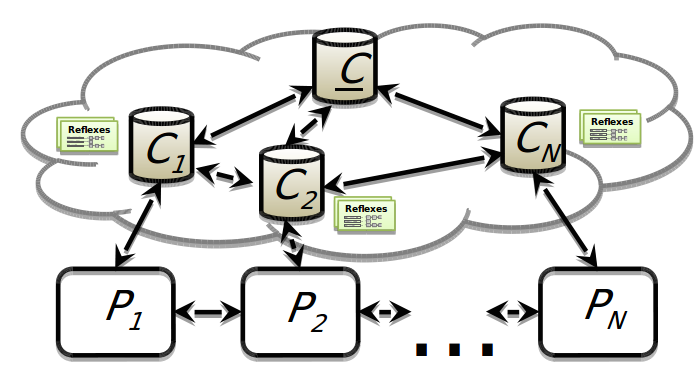
Networked Control
Research into how control algorithms can contribute to the performance of communication systems.
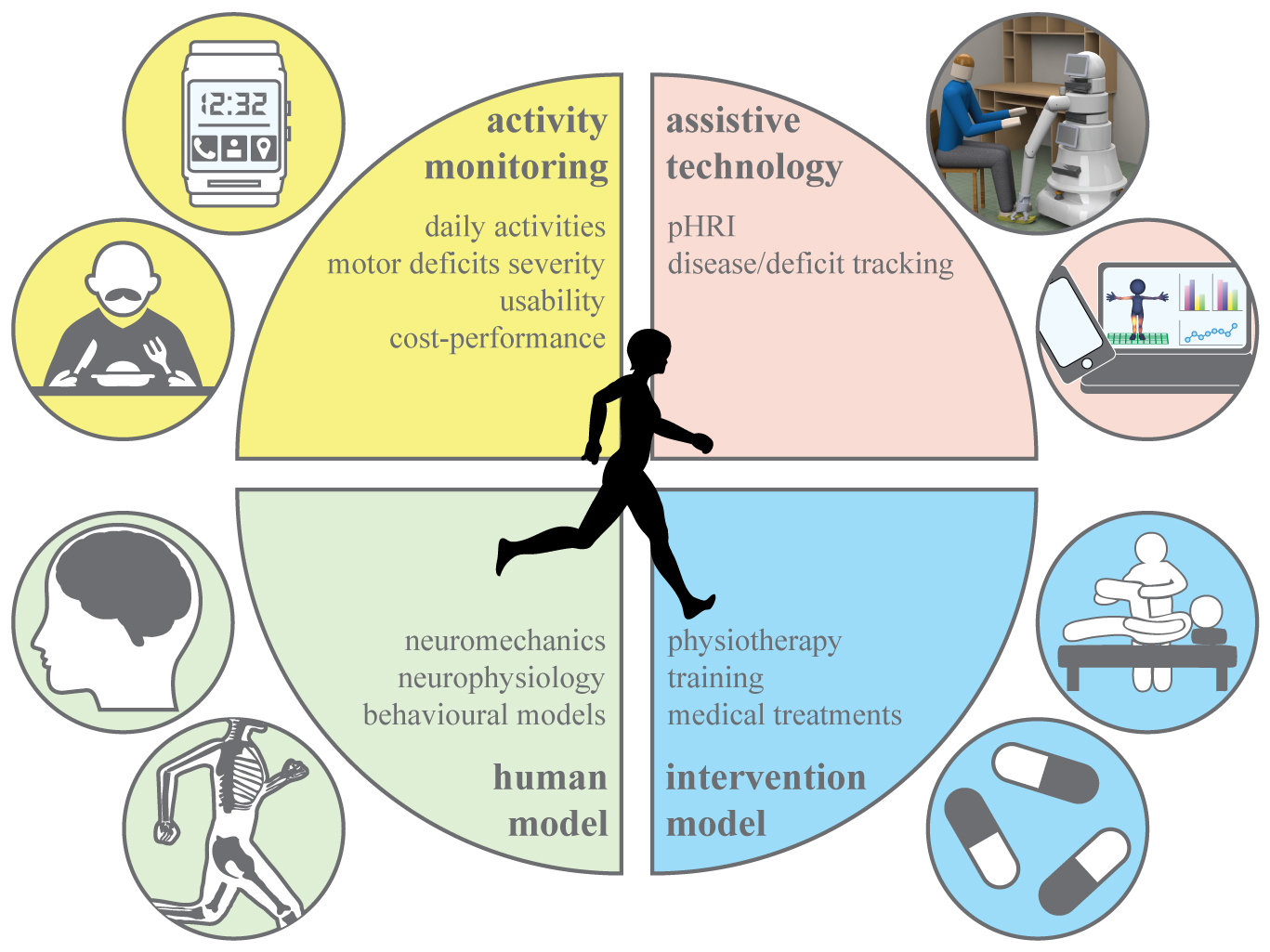
Human-centered Control
Research into modeling human behavior for control applications.

Bio-inspired Design
Research into how biological systems can contribute to new advances in robotics.

Cooperative robotics
Research and development for multi-robot and human-robot interaction applications