- Toward Dexterous Hand Functional Movement: Wearable Hybrid Soft Exoglove-FES Study. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), 2024 mehr… BibTeX
- Hybrid robotic and electrical stimulation assistance can enhance performance and reduce mental demand. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2023, 1-1 mehr… BibTeX
- Hybrid Functional Electrical Stimulation and Robotic Assistance for Wrist Motion Training after Stroke: Preliminary Results. The International Conference on Rehabilitation Robotics (ICORR) 2023, 2023 mehr… BibTeX
- Model-Based Shared Control of a Hybrid FES-Exoskeleton: an Application in Participant-Specific Robotic Rehabilitation. 2023 International Conference on Rehabilitation Robotics, ICORR 2023, 2023 mehr… BibTeX
Adaptive Control of Hybrid Exoskeleton‑FES Systems
Researcher: Hossein Kaviani rad, Satoshi Endo
Motivation
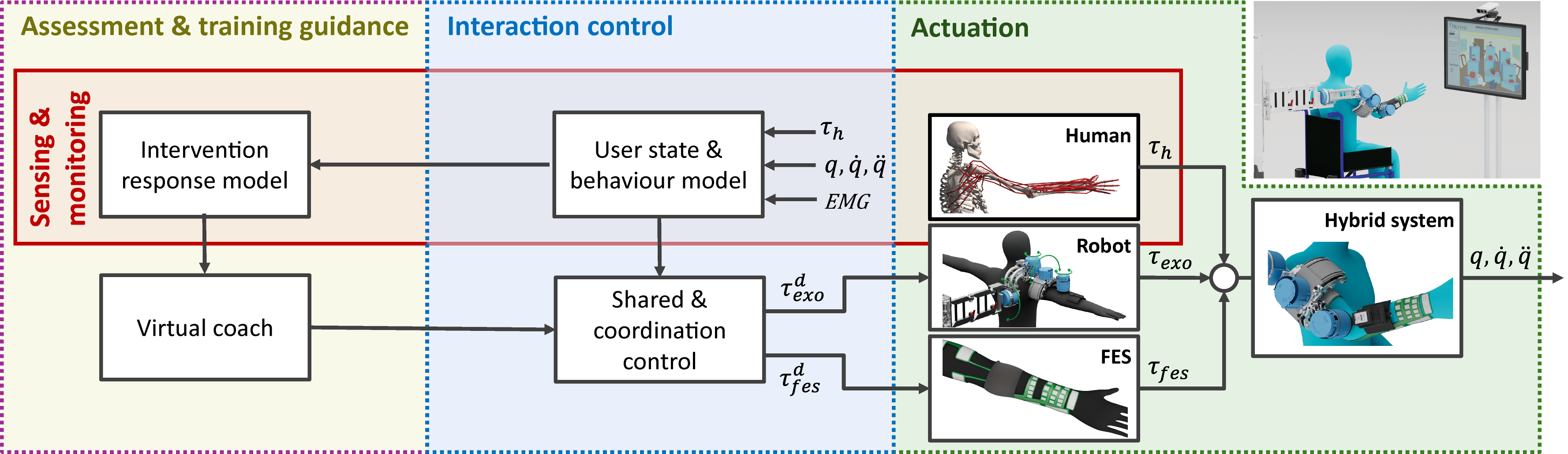
Hybrid rehabilitation systems combining robotic exoskeletons with functional electrical stimulation (FES) present a powerful opportunity to restore upper‑limb function in people with severe motor impairments, such as stroke survivors and individuals with spinal cord injury. Robotic assistance offers precise and consistent mechanical support, while FES directly engages the neuromuscular system, activating muscles and promoting neuroplasticity.
The challenge is to achieve balanced actuation sharing between the human, the exoskeleton, and FES. Over‑reliance on the robot can reduce active neuromuscular engagement, limiting recovery potential, while excessive FES can cause discomfort, rapid fatigue, and reduced therapeutic effectiveness. The neuromuscular response to FES is inherently time‑varying, affected by muscle fatigue, recruitment patterns, and non‑linear activation dynamics, and varies between individuals and across therapy sessions.
To address this, we need robust, trustworthy control strategies grounded in models that capture the uncertainty, variability, and noise inherent in human–machine interaction, and that adapt in real time to changes in both the human and device behaviour.
Research questions
- How can we model hybrid human–machine systems in a way that captures variability in mechanical and physiological response, including the time‑varying properties of FES?
- How can control strategies dynamically manage actuation redundancy between voluntary effort, FES, and robotic assistance to maximise functional recovery?
- How can uncertainty in system behaviour be estimated and incorporated into control decisions to maintain safety and trust?
- How can these models adapt over the course of rehabilitation, progressively shifting the balance of effort toward the patient as capability improves?
Approach
Our approach focuses on developing probabilistic, time‑adaptive models of the hybrid exoskeleton–FES system that explicitly account for variability in human motor performance and neuromuscular response. These models continuously monitor changes in FES effectiveness, mechanical output, and voluntary contribution, updating their internal representation in real time.
By incorporating uncertainty quantification into the control loop, the system can recognise when confidence in its predictions is low and adjust its assistance strategy accordingly. This enables it to allocate torque dynamically between the human, FES, and robot, ensuring just enough support to achieve stable, high‑quality movement while keeping the patient actively engaged. In stroke rehabilitation, this allows the controller to adapt as strength and coordination improve, progressively reducing robotic support and encouraging voluntary movement.
Beyond real‑time adaptation, this framework also guides targeted data collection for model refinement, identifying which conditions require further clinical measurement and providing insights that can inform personalised rehabilitation planning.
Key results and achievements
- Defined a redundancy‑aware control paradigm that dynamically balances torque sharing between voluntary effort, FES‑induced activation, and robotic assistance.
- Developed stochastic, uncertainty‑aware modelling concepts that capture the time‑varying behaviour of FES‑driven muscle activation.
- Demonstrated in pilot studies that adaptive actuation sharing can improve movement smoothness and completeness compared to FES‑only or robot‑only approaches.
- Preserved neuromuscular engagement while maintaining stability and comfort, supporting long‑term recovery potential.
Personalised Neuromodulation Control
Researcher: Hossein Kaviani rad, Satoshi Endo
Motivation
Functional electrical stimulation (FES) can restore or assist movement in individuals with neurological impairments such as stroke, spinal cord injury, or neuromuscular disease by activating paralysed or weakened muscles. Beyond assisting movement execution, FES engages the neuromuscular system directly, providing strong sensory feedback to the central nervous system and promoting neuroplasticity.
The challenge lies in controlling FES effectively. The neuromuscular response to stimulation is non‑linear, noisy, and time‑varying, influenced by factors such as electrode placement, muscle fatigue, changing recruitment patterns, and skin–electrode interface conditions. Excessive stimulation can cause discomfort, fatigue, and reduced engagement, while insufficient stimulation fails to achieve the intended movement. Furthermore, voluntary muscle activity and stimulation‑evoked responses overlap in surface EMG signals, complicating both intent estimation and feedback control.
Research questions
- How can FES‑evoked muscle contractions be modelled in a way that captures non‑linear, time‑varying, and user‑specific response characteristics?
- How can voluntary intent be estimated from EMG even when stimulation artefacts and evoked potentials are present?
- How can stimulation intensity and timing be adapted in real time to maximise functional movement while avoiding over‑stimulation or fatigue?
- How can uncertainty in stimulation response be quantified and incorporated into safe, robust control strategies?
Approach
We are developing adaptive, EMG‑informed control frameworks for FES that combine:
- Robust EMG processing to separate voluntary signals from stimulation artefacts and evoked potentials in real time.
- Probabilistic, user‑specific models of muscle activation that capture the time‑varying nature of stimulation response and adapt continuously during use.
- Uncertainty‑aware control that adjusts stimulation parameters dynamically based on confidence in predicted outcomes, ensuring safety and reliability.
- Personalised calibration that uses short measurement sessions to initialise the model and refine parameters as the system interacts with the user.
By closing the loop between intent estimation, stimulation delivery, and real‑time monitoring of response, the system can provide precisely the right stimulation at the right time. In clinical populations such as stroke survivors, this allows FES to be delivered in synchrony with voluntary effort, reinforcing motor pathways and promoting recovery rather than replacing muscle activity.
Key results and achievements
- Developed robust EMG processing pipelines capable of operating during concurrent stimulation and voluntary movement.
- Designed adaptive stimulation controllers that account for fatigue and recruitment changes, maintaining stable movement quality over time.
- Demonstrated that EMG‑informed FES control improves synchronisation between voluntary intent and stimulation‑induced movement.
- Showed that personalised stimulation strategies can maintain comfort while achieving functional movement goals.

- Robust Bayesian Optimisation for Reliable FES Calibration. 2026 48th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC) (accepted), IEEE, 2026 mehr… BibTeX
- Repetitive Grasping After Stroke Assisted by Functional Electrical Stimulation. Artificial Organs, 2025 mehr… BibTeX
- Framework for Learning a Hand Intent Recognition Model from sEMG for FES-Based control. 2024 10th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2024, 1320-1327 mehr… BibTeX
- The Gap in Functional Electrical Stimulation Simulation. 3rd Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics, 2022 mehr… BibTeX
- EMG-Based Volitional Torque Estimation in Functional Electrical Stimulation Control. 2022 IEEE-EMBS Conference on Biomedical Engineering and Sciences (IECBES), 2022 mehr… BibTeX