Compensating the Effect of Communication Delay in Client-Server-Based Shared Haptic Virtual Environments
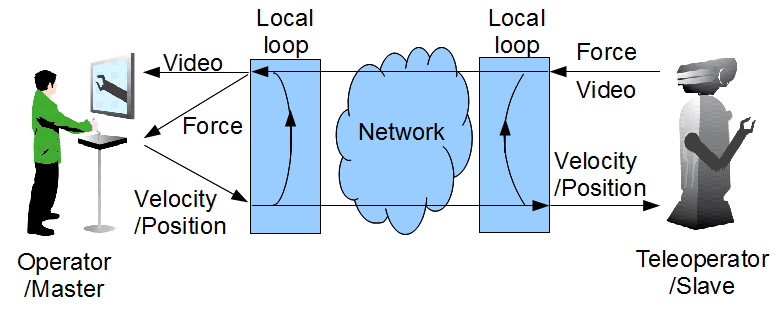
Shared Haptic Virtual Environments can be realized using a client-server architecture. In this architecture, each client maintains a local copy of the virtual environment (VE). A centralized physics simulation running on a server calculates the object states based on haptic device position information received from the clients. The object states are sent back to the clients to update the local copies of the VE, which are used to render interaction forces displayed to the user through a haptic device.
Communication delay leads to delayed object state updates and increased force feedback rendered at the clients. In this work, we analyze the effect of communication delay on the magnitude of the rendered forces at the clients for cooperative multi-user interactions with rigid objects. The analysis reveals guidelines on the tolerable communication delay. If this delay is exceeded, the increased force magnitude becomes haptically perceivable.We propose an adaptive force rendering scheme to compensate for this effect, which dynamically changes the stiffness used in the force rendering at the clients. Our experimental results, including a subjective user study, verify the applicability of the analysis and the proposed scheme to compensate the effect of time-varying communication delay in a multi-user SHVE.
Publications:
C. Schuwerk, X. Xu, R. Chaudhari, E. Steinbach,
Compensating the Effect of Communication Delay in Client-Server-Based Shared Haptic Virtual Environments,
ACM Transactions on Applied Perception, vol. 13, no. 1, pp. 1-22, December 2015.
Remote Texture Exploration
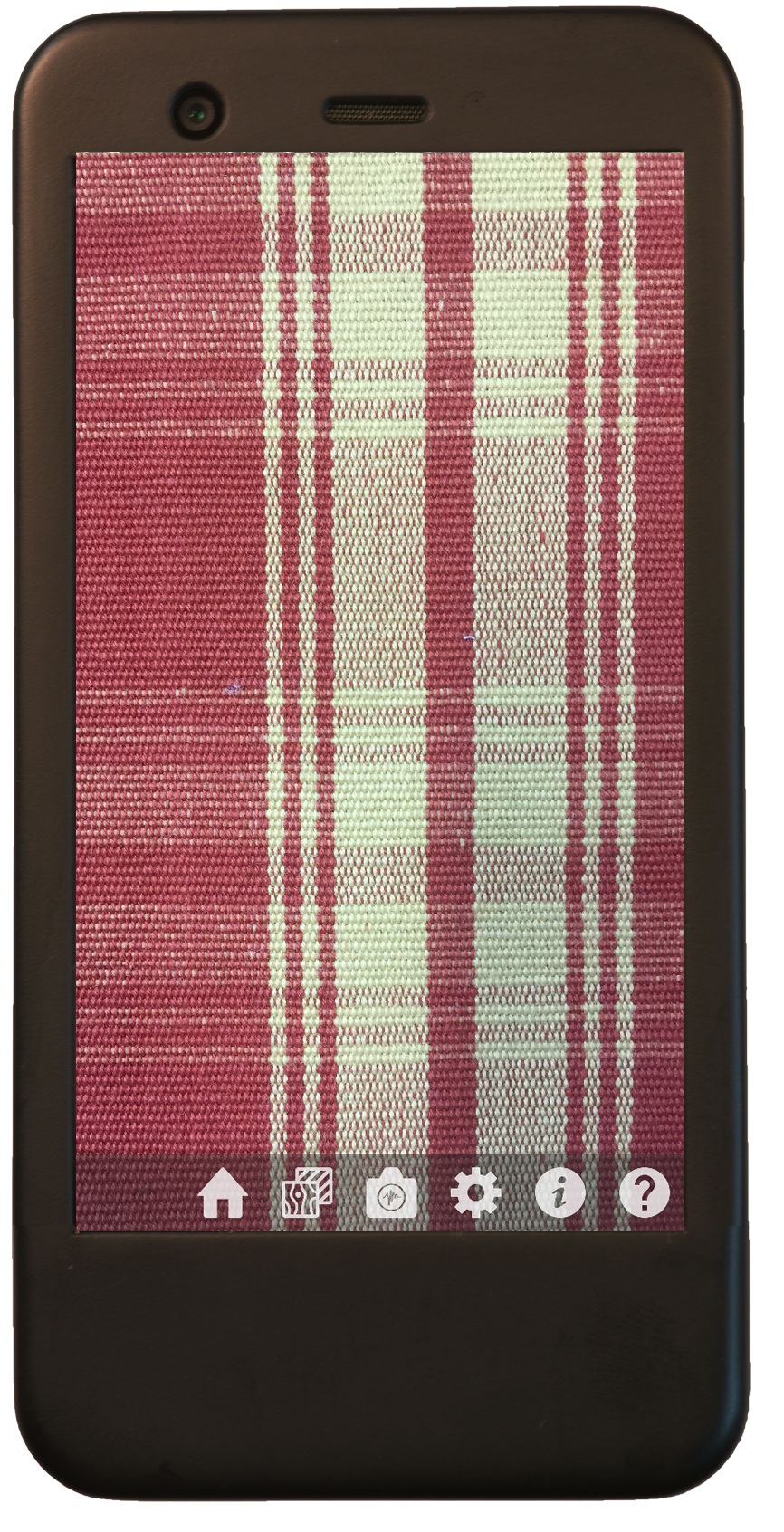
Imagine you are using your mobile device to browse the Internet for new furniture, home decoration or clothes. Today’s systems provide us only with information about the look of the products, but how does their surface feel when touched? For the future, we imagine systems that allow us to remotely enjoy the look and feel of products. The impact of such technology could be enormous, especially for E-Commerce. Tangible example applications are product customization, selection of materials, product browsing or virtual product showcases.
The „Remote Texture Exploration“ app displays surface textures using the TPad Phone, which can be received from a texture database or from remote smartphones. Vibration and audio feedback is included to enrich the user experience. The texture models used to display textures recreate important dimensions of human tactile perception, like roughness or friction. New texture models are created using live recordings from the smartphone sensors (IMU, camera, microphone).
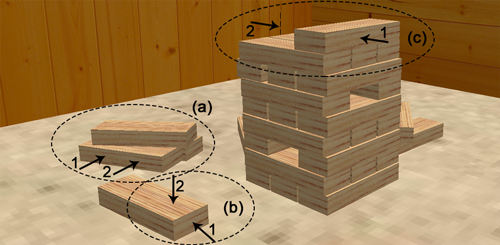
Model-mediated Teleoperation for Movable Objects: Dynamics Modeling and Packet Rate Reduction
In this work, we study Model-Mediated Teleoperation (MMT) for objects which can be moved and rotated on a planar surface. In MMT, a simple object model is employed on the master side to approximate the remote environment. The haptic feedback is rendered locally on the master side based on the model whose parameters are estimated on the slave side. Since the haptic control loop is running locally without noticeable delay, system stability can be guaranteed in the presence of arbitrary communication delays. The main challenges for MMT are environment modeling and online parameter identification. This work has two contributions. Firstly, we describe how to model movable objects with approximately known model geometry for MMT systems. The object dynamics including environment damping as well as the friction are modeled in real time during teleoperation. Secondly, we propose a hybrid deadband-based and time-triggered updating scheme to adaptively reduce the required packet rate while transmitting the estimated model parameters from the slave to the master. According to our experiments, the movable object can be accurately modeled in real time. In addition, compared to the conventional deadbandbased updating scheme, our proposed hybrid updating scheme shows improvements in both model accuracy and packet rate reduction.
Publications:
X. Xu, S. Chen, E. Steinbach,
Model-mediated Teleoperation for Movable Objects: Dynamics Modeling and Packet Rate Reduction,
14th IEEE International Symposium on Haptic Audio-Visual Environments and Games, Ottawa, Canada, October 2015.
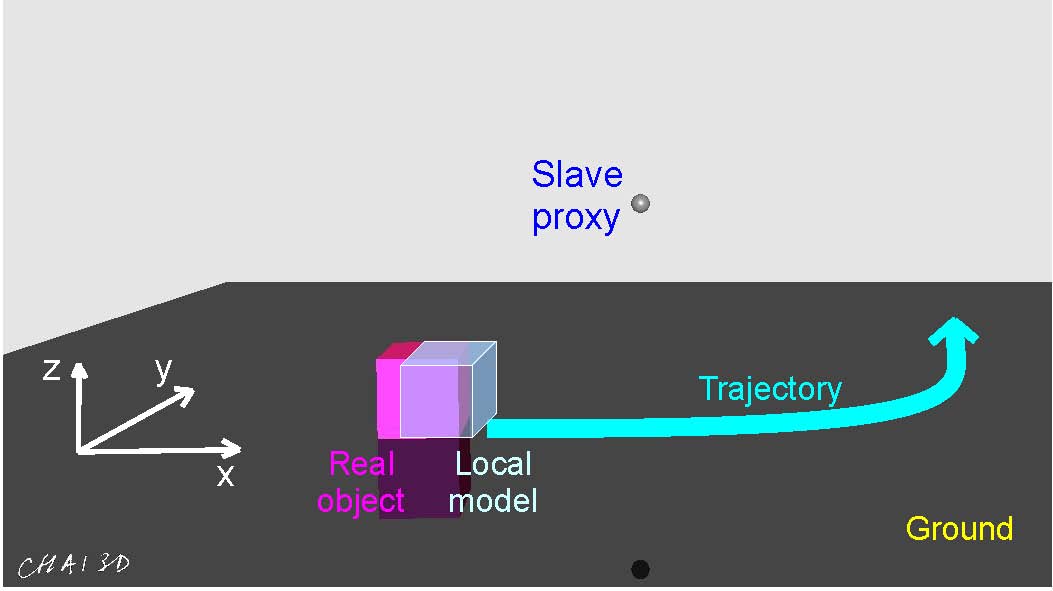
Passivity-based Model Update for Model-mediated Teleoperation
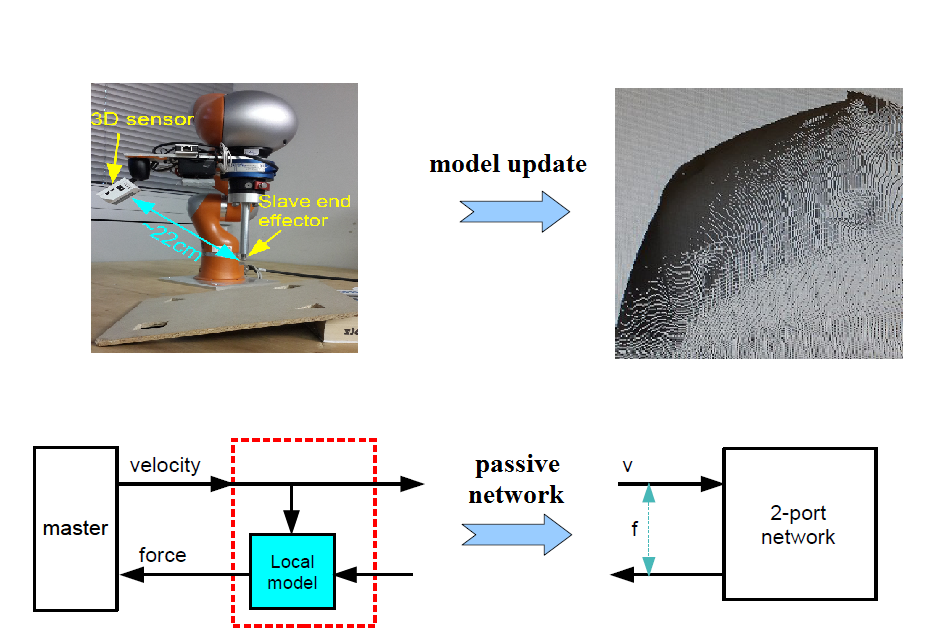
We study the stability of three-dimensional (3D) haptic interaction in Model-mediated Teleoperation (MMT) systems in this work. In MMT, a simple object model is employed on the master side to approximate the remote environment. The haptic feedback is rendered locally on the master side based on model parameters which are estimated on the slave side. The local model must be updated when the environment changes, or novel, previously unseen parts are encountered. During the model update, a sudden change of the model parameters leads to model-jump effects and results in unpredictable motion and force. A smooth and stable model update scheme is required to mitigate this effect. To guarantee system stability, we derive a passivity condition for a 3D spring-damper model during the model update phase. Energy generated due to the changes of the model parameters is dissipated through an adaptive damper element. The sampling effect of the haptic device is also taken into account. The performance of the proposed passivity-based model update (PMU) scheme is evaluated through simulations and subjective experiments. Evaluation results show that by using the PMU scheme, system stability during the model update phase is guaranteed. Moreover, subjects feel more comfortable with the model update if the PMU scheme is enabled.
Publications:
X. Xu, C. Schuwerk, E. Steinbach,
Passivity-based Model Update for Model-mediated Teleoperation,
6th IEEE International Workshop on Hot Topics in 3D - Hot3D, Proc. of IEEE International Conference on Multimedia & Expo, Turin, Italy, June 2015.
Haptic Data Reduction for Time-delayed Teleoperation Using the Time Domain Passivity Approach
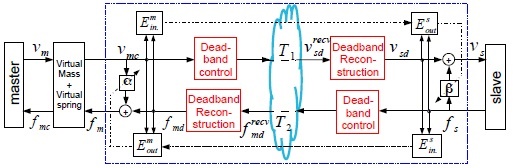
We propose a perceptual haptic data reduction approach for teleoperation systems which uses the time domain passivity approach (TDPA) as their control architecture for dealing with time-varying delay. Our goal is to reduce the packet rate over the communication network while preserving system stability in the presence of time-varying and unknown communication delays. Compared to the existing wave variable-based (WV-based) haptic data reduction approaches, our proposed scheme leads to smaller distortion in the force signals and is flexible and robust to time-varying delays. Experiments show that our proposed approach can reduce the packet rate by up to 80%, without introducing significant distortion. In addition, the proposed approach outperforms the existing WV-based approaches in both packet rate reduction and subjective preference for the tested delays.
Publications:
X. Xu, C. Schuwerk, E. Steinbach,
Passivity-based Model Update for Model-mediated Teleoperation,
6th IEEE International Workshop on Hot Topics in 3D - Hot3D, Proc. of IEEE International Conference on Multimedia & Expo, Turin, Italy, June 2015.
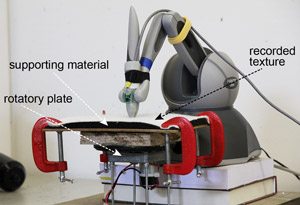
Surface Classification Using Acceleration Signals Recorded During Human Freehand Movement
Dragging a tool over textured surfaces leads to vibrations that can be captured using acceleration sensors. Based on these signals, this work presents an approach for tool-mediated texture classification which is robust against varying scan-time parameters. We examine freehand recordings of 69 textures and propose a classification system, which uses perception-related features such as hardness, roughness and friction as well as selected features adapted from speech recognition such as modified cepstral coefficients. We focus on mitigating the effect of varying contact force and hand speed conditions on these features as a prerequisite for a robust Machine Learning based approach for texture classification. Our system works without explicit scan force and velocity measurements. Experimental results show that our proposed approach allows for successful classification of textures under varying freehand movement conditions. The proposed features lead to a classification accuracy of 95% when combined with a Naive Bayes Classifier.
Publications:
M. Strese, C. Schuwerk, E. Steinbach,
Surface Classification Using Acceleration Signals Recorded During Human Freehand Movement,
IEEE World Haptics Conference, Chicago, USA, June 2015.
Transparency Analysis of Client-Server-based Multi-rate Haptic Interaction with Deformable Objects
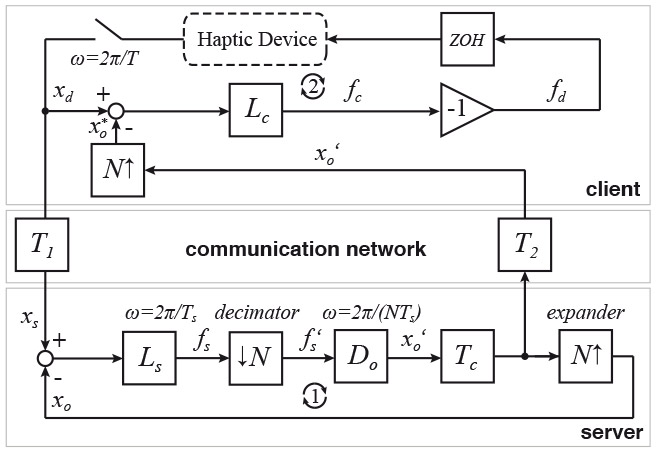
In this work we describe a client-server architecture for haptic interaction with simulated deformable objects. The computationally expensive object deformation is computed on the server at a low temporal update rate and transmitted to the clients. There, an intermediate representation of the deformable object is used to locally render haptic force feedback displayed to the user at the required rate of 1 kHz. Based on a one-dimensional deformable object, we analyze the transparency of this multi-rate architecture for a single client interaction. The delay introduced by the deformation simulation and the client-server communication leads to increased rendered forces at the clients compared to a reference scenario without delay. We propose a method that adaptively adjusts the stiffness used in the local force rendering at the client to compensate for this. The evaluation shows that the proposed method successfully compensates the effect of delay in the tested delay range of up to 100 ms.
Publications:
C. Schuwerk, X. Xu, W. Freund, E. Steinbach,
Transparency Analysis of Client-Server-based Multi-rate Haptic Interaction with Deformable Objects,
IEEE World Haptics Conference, Chicago, USA, June 2015.
Objective Quality Prediction for Haptic Texture Signal Compression
Perceptual quality for media compression algorithms is traditionally evaluated through user studies. Such studies are time-consuming, laborious and expensive, slowing down the development of new signal processing algorithms. To address this problem, a number of algorithmic quality prediction methodologies have been developed in the audio and video fields, something that is currently lacking in haptics research.
In this work, we present a novel method for predicting the perceptual quality degradation of compressed haptic texture signals. For this purpose, abstract perceptual features like Roughness, Brightness, etc. that capture the subjective experience of textures are exploited, in addition to low-level psychophysical models from the literature. As compared to the state-of-the-art, the presented prediction methodology shows an approximately 30% improvement in explaining the variance in the perceptual data.
Publications:
R. Chaudhari, Y. Yoo, C. Schuwerk, S. Choi, E. Steinbach,
Objective Quality Prediction for Haptic Texture Signal Compression,
IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brisbane, Australia, April 2015.
Perceptual and Bitrate-scalable Coding of Haptic Surface Texture Signals

Simultaneous masking is a perceptual phenomenon widely exploited in the compression of audio data. In this work, to the best of our knowledge, we present first-time empirical evidence for masking in the perception of wideband vibrotactile signals. Our results show that this phenomenon for haptics is very similar to its auditory analog. Signals closer in frequency to a powerful masker (25 dB above detection threshold) are masked more strongly (peak threshold-shifts of up to 28 dB) than those away from the masker (threshold-shifts of 15-20 dB). The masking curves approximately follow the masker’s spectral profile. We also present a bitrate scalable haptic texture codec, which incorporates the masking model and describe its subjective and objective performance evaluation. Experiments show that we can drive down the codec output bitrate to a very low value of 2.3 kbps, without the subjects being able to reliable discriminate between the codec input and distorted output texture signals.
Publications:
R. Chaudhari, C. Schuwerk, M. Danaei, E. Steinbach,
Perceptual and Bitrate-scalable Coding of Haptic Surface Texture Signals,
IEEE Journal of Selected Topics in Signal Processing (JSTSP), vol. 9, no. 3, April 2015.
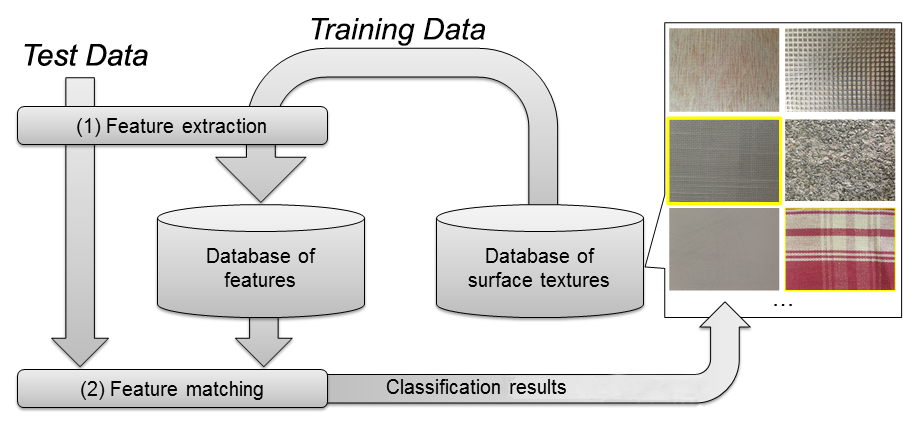
A Haptic Texture Database for Tool-mediated Texture Recognition and Classification
While stroking a rigid tool over an object surface, vibrations induced on the tool, which represent the interaction between the tool and the surface texture, can be measured by means of an accelerometer. Such acceleration signals can be used to recognize or to classify object surface textures. The temporal and spectral properties of the acquired signals, however, heavily depend on different parameters like the applied force on the surface or the lateral velocity during the exploration. Robust features that are invariant against such scan-time parameters are currently lacking, but would enable texture classification and recognition using uncontrolled human exploratory movements. In this work, we introduce a haptic texture database which allows for a systematic analysis of feature candidates. The publicly available database includes recorded accelerations measured during controlled and well-defined texture scans, as well as uncontrolled human free hand texture explorations for 43 different textures. As a preliminary feature analysis, we test and compare six well-established features from audio and speech recognition together with a Gaussian Mixture Model-based classifier on our recorded free hand signals. Among the tested features, best results are achieved using Mel-Frequency Cepstral Coefficients (MFCCs), leading to a texture recognition accuracy of 80.2%. Please visit our LMT Haptic Texture Database website for more details.
Publications:
M. Strese, J. Lee, C. Schuwerk, Q. Han, H. Kim, E. Steinbach,
A Haptic Texture Database for Tool-mediated Texture Recognition and Classification,
Proc. of IEEE Int. Symposium on Haptic Audio-Visual Environments and Games (HAVE), Dallas, Texas, USA, October 2014.
A Visual-Haptic Multiplexing Scheme for Teleoperation over Constant-Bitrate Communication Links
We developed a novel multiplexing scheme for teleoperation over constant bitrate (CBR) communication links. The approach uniformly divides the channel into 1ms resource buckets and controls the size of the transmitted video packets as a function of the irregular haptic transmission events. The performance of the proposed multiplexing scheme was measured objectively in terms of delay-jitter and packet rates. The results were achieved with acceptable multiplexing delay on both the visual and haptic streams. Our evaluation shows that the proposed approach can provide a guaranteed constant delay for the time-critical force signal, while introducing acceptable video delay.
Publications:
B. Cizmeci, R. Chaudhari, X. Xu, N. Alt, E. Steinbach,
A Visual-Haptic Multiplexing Scheme for Teleoperation over Constant-Bitrate Communication Links,
Proc. of EuroHaptics Conference (accepted for oral presentation), Versailles, France, June 2014.
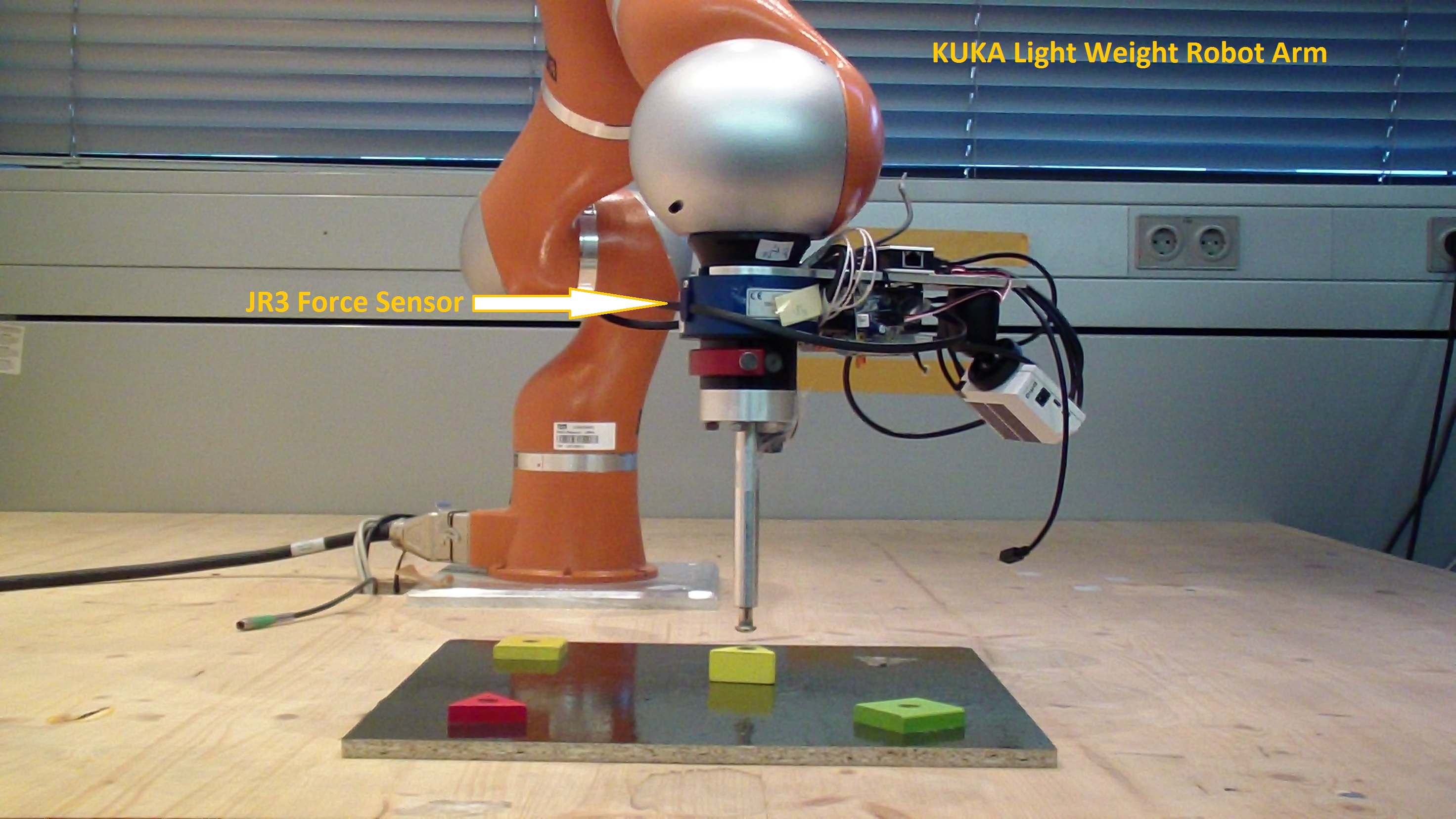
Navigation and Manipulation Planning using a Visuo-haptic Sensor on a Mobile Platform
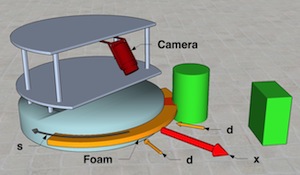
Mobile systems interacting with objects in unstructured environments require both haptic and visual sensors to acquire sufficient scene knowledge for tasks such as navigation and manipulation. Typically, separate sensors and processing systems are used for the two modalities. We propose to acquire haptic and visual measurements simultaneously, providing naturally coherent data. For this, compression of a passive, deformable foam rod mountedon the actuator is measured visually by a low-cost camera, yielding a 1D stress function sampled along the contour of the rod. The same camera observes the nearby scene to detect objects and their reactions to manipulation. The system is passively compliant and the complexity of the sensor subsystems is reduced. Furthermore, we present an integrated approach for navigation and manipulation on mobile platforms which integrates haptic data from the sensor. A high-level planning graph represents both the structure of a visually acquired map, as well as manipulable obstacles. Paths within this graph represent high-level navigation and manipulation tasks, e.g. pushing of obstacles. A cost-optimal task plan is generated using standard pathfinding techniques. The approach is implemented and validated on a mobile robotic platform. Obtained forces are compared to a reference, showing high accuracy within the medium sensor range. A real-world experiment is presented which uses the sensor for haptic exploration of obstacles in anoffice environment. Substantially faster task plans can be found in cluttered scenes compared to purely visual navigation.
Publications:
N. Alt, E. Steinbach,
Navigation and Manipulation Planning using a Visuo-haptic Sensor on a Mobile Platform,
IEEE Transactions on Instrumentation and Measurement, vol. 63, no. 11, 2014.
Towards Real-time Modeling and Haptic Rendering of Deformable Objects for Point Cloud-based Model-mediated Teleoperation
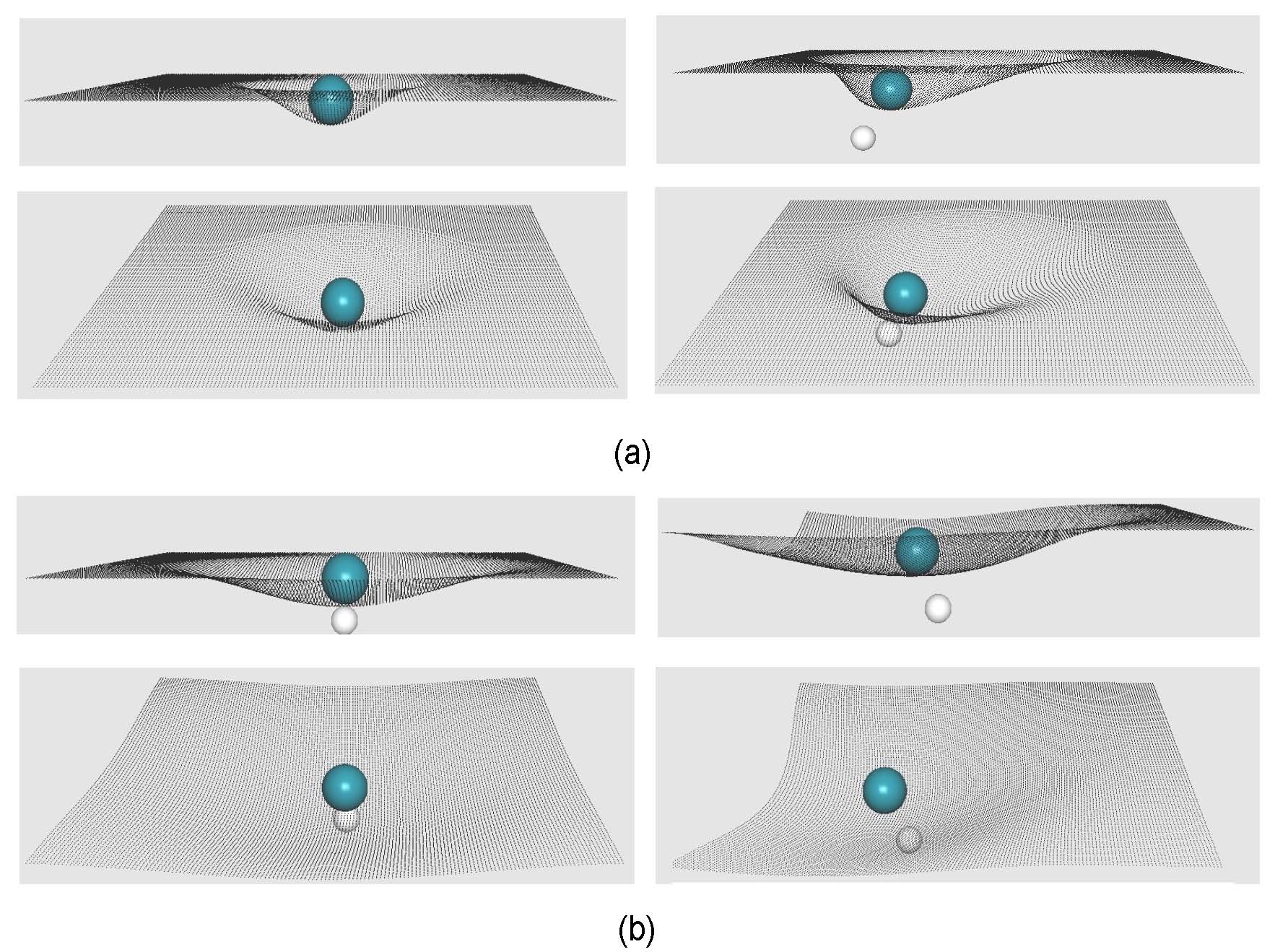
We propose a novel radial function-based deformation (RFBD) approach to enable real-time modeling and haptic rendering of deformable objects for point cloud-based Model-Mediated Teleoperation (pcbMMT). In the pcbMMT system, a time-of-flight camera is employed on the slave side to capture a 3D point cloud model of the remote environment. This environment model is transmitted to the master along with the estimated model parameters, including the dynamics of the
object’s surface deformation and the physical properties such as the stiffness, friction coefficient, etc. Due to the simplicity of the RFBD approach, the model parameters of the remote environment can be obtained in real time. On the master side, a local copy of the environment model is maintained according
to the received parameters. Both the haptic rendering and deformation simulation are based on this local model, running at 1kHz. Thus, a good compromise is achieved between the model accuracy and the computational time for online parameter identification. Experiments verify the feasibility of the proposed approach, and show the results of the object deformation for different model parameters.
Publications:
X. Xu, E. Steinbach,
Towards Real-time Modeling and Haptic Rendering of Deformable Objects for Point Cloud-based Model-mediated Teleoperation,
5th IEEE International Workshop on Hot Topics in 3D - Hot3D, Proc. of IEEE International Conference on Multimedia & Expo, Chengdu, China, July 2014
Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating

In this work, we extend the concept of model-mediated teleoperation (MMT) for complex environments and six degrees of freedom interaction using point cloud surface models. In our system, a time-of-flight camera is used to capture a high resolution point cloud model of the object surface. The point cloud model and the physical properties of the object (stiffness and surface friction coefficient) are estimated at the slave side in real-time and transmitted to the master side using the modeling and updating algorithm proposed in this work. The proposed algorithm adaptively controls the updating of the point cloud model and the object properties according to the slave movements and by exploiting known limitations of human haptic perception. As a result, perceptually irrelevant transmissions are avoided, and thus the packet rate in the communication channel is substantially reduced. In addition, a simple point cloud-based haptic rendering algorithm is adopted to generate the force feedback signals directly from the point cloud model without first converting it into a 3D mesh. In the experimental evaluation, the system stability and transparency are verified in the presence of a round-trip communication delay of up to 1000ms. Furthermore, by exploiting the limits of human haptic perception the presented system allows for a significant haptic data reduction of about 90% for teleoperation systems with time delay.
Publications:
X. Xu, B. Cizmeci, A. Al-Nuaimi, E. Steinbach,
Point Cloud-based Model-mediated Teleoperation with Dynamic and Perception-based Model Updating,
IEEE Transactions on Instrumentation and Measurement , vol. 63, no. 11, pp. 2558 - 2569 , 2014.
Delay Compensation in Shared Haptic Virtual Environments
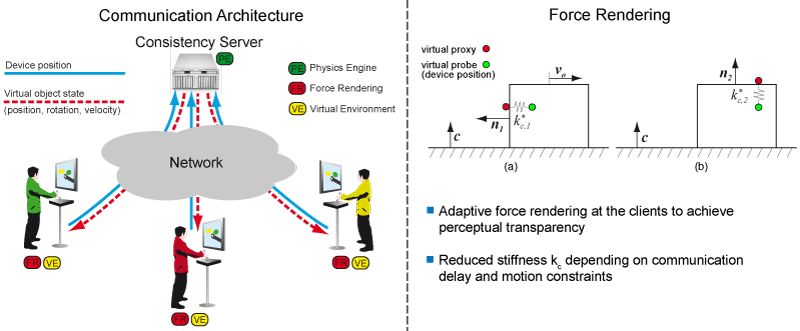
Shared Haptic Virtual Environments (SHVEs) are often realized using a client-server architecture. At the server, a physics simulation engine calculates the object states based on the position information received from the clients. At the clients, the object state information, received from the server, is used to update the local copy of the virtual environment. Forces displayed to the user through a haptic device are computed locally at the client based on the interactions with the objects. Communication delay leads to delayed object state updates and increased interaction forces rendered at the clients. Users perceive this as increased object weight. In this work, we systematically analyze the loss of transparency caused by communication delay and propose a novel adaptive force rendering scheme to compensate for it. The proposed scheme reduces the objects’ stiffness at the clients, based on delay, device velocity and motion constraints of the objects, only if necessary to achieve perceptual transparency. Simulations and subjective evaluations show that the effect of increased weight of objects is successfully compensated for the tested delay range of up to 150 ms. At the same time, if the object is unmovable, the perception of interaction with a rigid object is preserved.
Publications:
C. Schuwerk, R. Chaudhari, E. Steinbach,
Delay Compensation in Shared Haptic Virtual Environments,
IEEE Haptics Symposium (HAPTICS), Houston, USA, Februar 2014.
Point-cloud-based Model-mediated Teleoperation
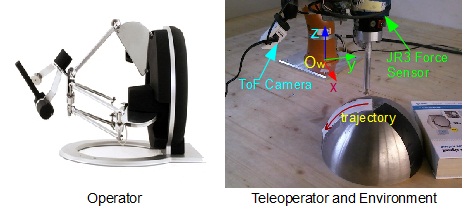
In this work, we extend the concept of model-mediated teleoperation (MMT) to six degrees-of-freedom in complex environments using a time-of-flight (ToF) camera. Compared to the original MMT method, the remote environment is no longer approximated by a simple planar surface, but by a point cloud model. Thus, object surfaces with complex geometry can be used in MMT. In our proposed system, the point cloud model is captured by the ToF camera with high temporal resolution (up to 160fps) and a flexible work range (10cm to 5m). Updating the model of the remote environment while the robot is in operation is thus easier compared to the original MMT approach. The point cloud model is transmitted from the teleoperator to the operator using a lossless H.264 codec. In addition, a simple point-cloud-based haptic rendering algorithm is adopted to generate the force feedback signal directly from the point cloud model without first converting it into polygons. Moreover, to compensate for the estimation error of the point cloud model, adaptive position and force control schemes are applied to enable stable and transparent teleoperation. Our experiments demonstrate the feasibility and benefits of utilizing the proposed method in MMT.
Publications:
X. Xu, B. Cizmeci, E. Steinbach,
Point-cloud-based Model-mediated Teleoperation,
Proc. of IEEE Int. Symposium on Haptic Audio-Visual Environments and Games (HAVE), Istanbul, Turkey, Oktober 2013.
Prediction Techniques for Haptic Communication and their Vulnerability to Packet Losses
We introduced three different uses of linear regression for improving the prediction of samples in haptic communication and compared this technique to the commonly employed zero-order and first-order linear predictors. We coupled the prediction techniques with (error resilient) perceptual data reduction approaches and evaluated their robustness when losses in the network are present. Experimental results showed that the proposed prediction technique improved haptic data reduction while keeping lower signal distortion compared to the traditional prediction methods when facing adverse network conditions.
Publications:
F. Brandi, E. Steinbach,
Prediction Techniques for Haptic Communication and their Vulnerability to Packet Losses,
Proc. of IEEE Int. Symposium on Haptic Audio-Visual Environments and Games (HAVE), Istanbul, Turkey, Oktober 2013.
Smooth Object State Updates in Distributed Haptic Virtual Environments
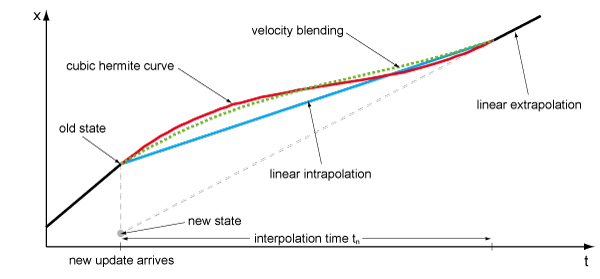
In a multi-user distributed haptic virtual environment (DHVE), object state update messages are necessary to maintain a consistent virtual environment at every entity involved. Traffic control schemes applied to reduce the usually high number of update packets lead to inconsistencies among the participants. Whenever a new state update is received, the discrepancy between the old and new object state has to be resolved. For this purpose, various interpolation methods can be used to smoothly correct the state error. In this work, we investigate and compare three such methods using subjective experiments to determine a haptically preferred method that leads to a convincing force feedback. Besides basic linear interpolation, we test two other methods from literature, which are based on cubic polynomials. Our experimental evaluation, based on a pursuit-tracking task and pairwise comparisons, shows that linear interpolation performs better than the two cubic approaches and is subjectively preferred.
Publications:
C. Schuwerk, E. Steinbach,
Smooth Object State Updates in Distributed Haptic Virtual Environments,
Proc. of IEEE Int. Symposium on Haptic Audio-Visual Environments and Games (HAVE), Istanbul, Turkey, Oktober 2013.
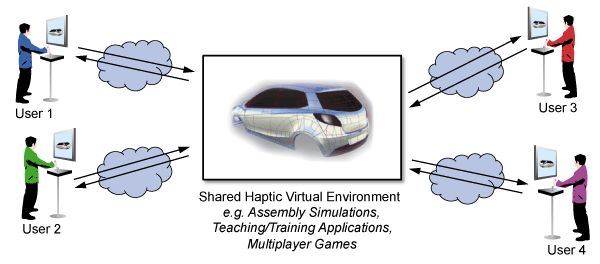
An Area-of-Interest based Communication Architecture for Shared Haptic Virtual Environments
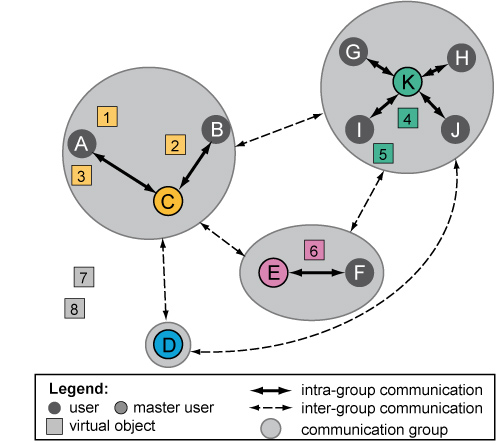
Communication architectures conceived for Shared Haptic Virtual Environments (SHVEs) are based on either the client-server or the peer-to-peer paradigms. High-rate rendering and communication between collaborating users quickly leads to performance bottlenecks, if the virtual environment’s size and complexity or the number of collaborating users increases. We propose a decentralized communication architecture for SHVEs, which exploits areas of interest (AoI) of a user to dynamically form smaller communication groups. High-rate information ex- change following the client-server paradigm is used within these groups to support satisfactory haptic collaboration and consistency. A single group member is selected to simulate the object states and to relay this state to the other group members. Peer-to-peer inter-group communication is also used, based on spatial proximity, to further reduce the overall communication load. We implemented a prototype based on our proposed architecture and present some first evaluation results. They serve as a proof-of-concept and show the effectiveness of dynamic group maintenance in conjunction with additional traffic control schemes.
Publications:
C. Schuwerk, N. Chaudhari, E. Steinbach,
An Area-of-Interest based Communication Architecture for Shared Haptic Virtual Environments,
Proc. of IEEE Int. Symposium on Haptic Audio-Visual Environments and Games (HAVE), Istanbul, Turkey, Oktober 2013.
Dynamic Model Displacement for Model-mediated Teleoperation
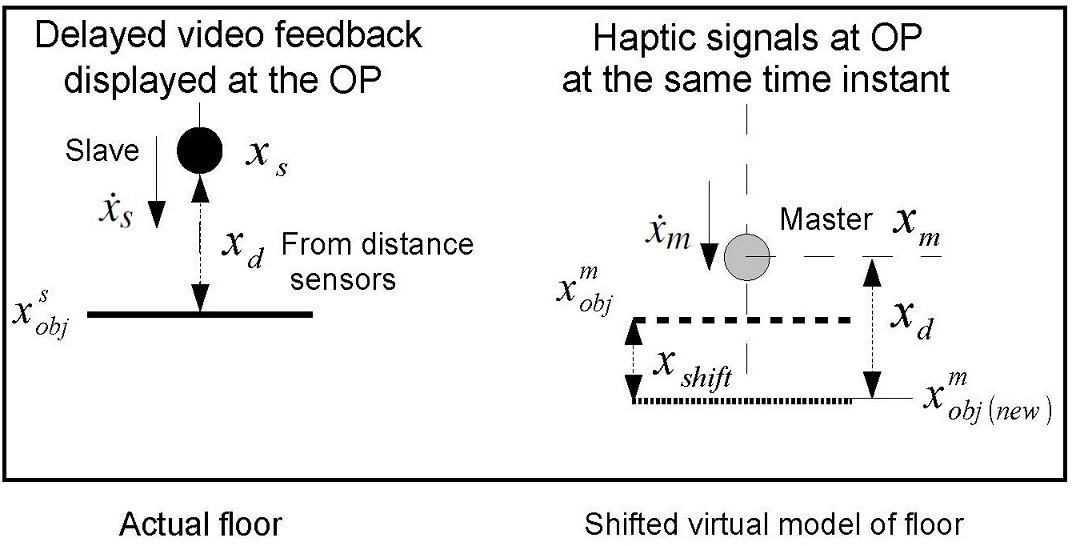
In this work, we study and extend the concept of model-mediated teleoperation (MMT) for teleaction systems which provide live video feedback from the remote side. In MMT, the haptic feed- back is rendered locally at the operator side using a simple object surface model in order to keep the haptic control loop stable in the presence of communication delays. Because the live video from the remote side is received with delay, this results into a visual-haptic asynchrony for the displayed interaction events. In addition, sudden model parameter updates can lead to “model-jump” effects for the displayed haptic feedback. Both effects degrade the user experience and system performance. To address these issues, we propose a novel approach called model-displaced teleoperation (MDT). In MDT, we adaptively shift the position of the local surface model to delay the haptic contact with the environment, thus compensating the visual-haptic asynchrony and avoiding the model-jump effect. As the haptic feedback is still rendered locally, the advantages of the MMT approach are retained and instabilities in the haptic interaction are avoided. In our experiments, we determine the perceptually optimal compromise between visual-haptic asynchrony, the model-jump effect and perceived distance errors and evaluate the subjective experience and objective task performance of the proposed MDT and the original MMT for a teleoperation setup with soft objects. Our results show that the users prefer the MDT method compared to MMT once the communication delay between the teleoperator and the operator exceeds 50ms. In addition, the task error rate is reduced by about 50% and the subjects are more capable to control their contact force for system delays larger than 200ms if our MDT method is employed.
Publications:
X. Xu, G. Paggetti, E. Steinbach,
Dynamic Model Displacement for Model-mediated Teleoperation,
IEEE World Haptics Conference 2013, Daejeon, Korea, April 2013.
On the Perceptual Artifacts Introduced by Packet Losses on the Forward Channel of Haptic Telemanipulation Sessions
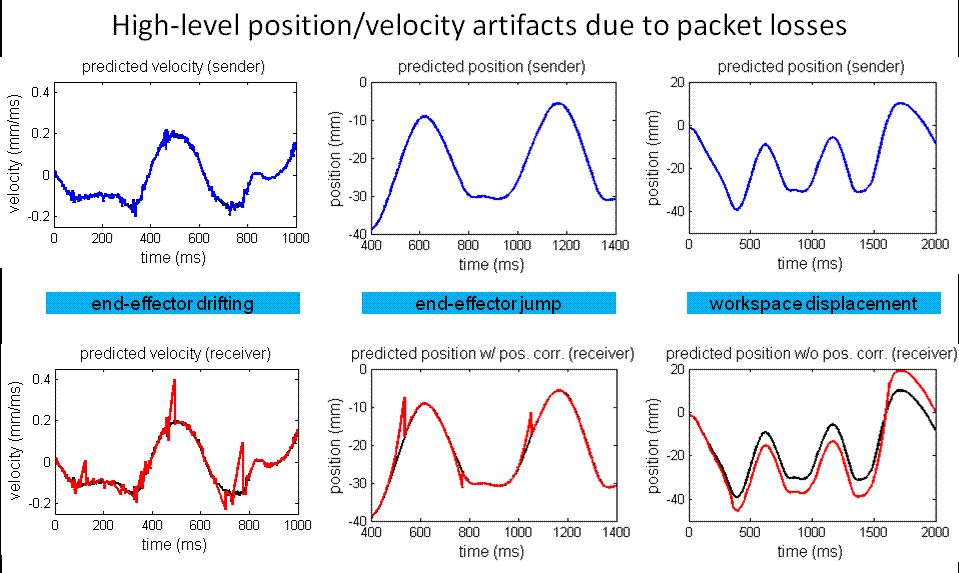
In this work we study the position and velocity signal reconstructions using predictive coding when packets are lost during telemanipulation sessions and classify the high-level haptic artifacts perceived by the users. The usage of packet-switched networks for bilateral telemanipulation systems is challenging due to several adversities such as low transmission rates, packet delays, jitter and losses. The previously proposed deadband-based haptic data reduction approaches se- lectively decrease the high transmission rate of the force-feedback and position/velocity samples on account of human perception limitations. Recently, an error-resilient perceptual haptic data reduction approach was proposed to address the packet losses in the feedback channel. However, the impact of faltered transmission on the forward channel and its subjective influence on the user are still an open issue and thus are treated in this paper.
Publications:
F. Brandi, B. Cizmeci, E. Steinbach,
On the Perceptual Artifacts Introduced by Packet Losses on the Forward Channel of Haptic Telemanipulation Sessions,
Proc. of EuroHaptics Conference, Tampere, Finland, Juni 2012.
Error-Resilient Perceptual Haptic Data Communication Based on Probabilistic Receiver State Estimation
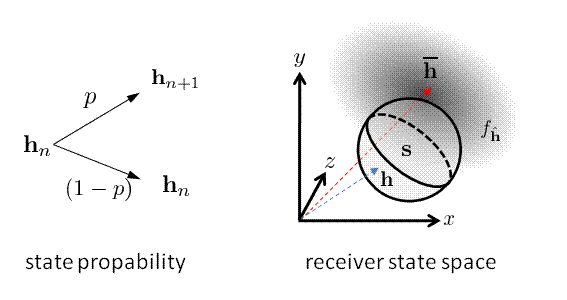
We present an error-resilient perceptual haptic data compression scheme based on a probabilistic receiver model. While the previously proposed perceptual deadband approach successfully addresses the challenges of high packet and data rates in haptic real-time communication, packet loss in the network leads to perceivable distortion. To address this issue, a sender-driven transmission scheme for low-latency packet loss compensation is proposed. In this scheme, packet transmissions are adaptively triggered only if the reveicer state is likely to deviate from the error-free signal by more than the applied perception thresholds. Conducted experiments validate that the proposed haptic communication scheme successful compensates for packet loss with low computational complexity and without the need of acknowledgments.
Publications:
J. Kammerl, F. Brandi, F. Schweiger, E. Steinbach,
Error-resilient Perceptual Haptic Data Communication based on Probabilistic Receiver State Estimation,
Proceedings of the EuroHaptics Conference, Tampere, Finland, Juni 2012.
Perceptually Robust Traffic Control in Distributed Haptic Virtual Environments
In this work we study traffic control for server to client communication in distributed haptic virtual environments (VE). We adopt a client-server architecture where the server manages the state consistency of the distributed VE, while haptic feedback is computed locally at each client. The update rate of network traffic from the server to the client is dynamically adapted by exploiting characteristics and limitations of human haptic perception. With this, an excellent trade- off between network communication efficiency and perceptually robust rendering of haptic feedback is achieved. Subjective tests with two users collaboratively manipulating a common object show a packet rate reduction of up to 99% from the server to the clients without deteriorating haptic feedback quality.
Publications:
C. Schuwerk, R. Chaudhari, E. Steinbach,
Perceptually Robust Traffic Control in Distributed Haptic Virtual Environments,
Proc. of EuroHaptics Conference, Tampere, Finland, Juni 2012.
Hybrid Signal-based and Geometry-based Prediction for Haptic Data Reduction
Haptic data reduction schemes address the high packet-rate requirements of networked haptics. Perception-driven predictive coding approaches enable strong packet rate reduction while keeping the introduced distortion below human haptic perception thresholds. The performance of predictive coding is strongly influenced by factors such as human behavior, system characteristics, geometric and impedance properties of the environment, etc. In this work, we first describe a novel surface geometry-based prediction approach for haptic data reduction where local object surface features are approximated with the help of simple geometric models. Secondly, we present a hybrid framework that combines signal-based and geometry- based prediction. Psychophysical experiments are performed to validate this framework. The results of the proposed geometry- based prediction show an improvement in haptic data reduction of about 54% as compared to the signal-based prediction (linear predictor). Furthermore, the presented hybrid prediction technique allows for an additional gain of 15%.
Publications:
X. Xu, J. Kammerl, R. Chaudhari, E. Steinbach,
Hybrid Signal-based and Geometry-based Prediction for Haptic Data Reduction,
IEEE International Symposium on Haptic Audio Visual Environments and Games, Qinhuangdao, Hebei, China, Oktober 2011.
Network Degradation Limits for Haptic Task Performance

For realtime teleoperation with haptic feedback, network-induced artifacts like delay, packet loss and lossy coding of haptic data deteriorate the operability of the system. We provide a systematic quantification of the limits within which, these network-induced degradations are tolerable for human task performance in executing a given haptic task. These limits are conservative in the sense that we do not account for any stabilizing approaches from control engineering to counter the impact of the network-induced degradations. Through experimental evaluation with a pursuit tracking task, we show that task performance is most affected by delay on the network and a strong lossy coding scheme. With statistical analysis we show that task performance is significantly decreased for one-way delay higher than 14 ms and strong lossy coding with a deadband parameter higher than 27 %. For the given task, packet loss is found not to affect task performance significantly.
Publications:
R. Chaudhari, C. Schuwerk, V. Nitsch, E. Steinbach, B. Faerber,
Opening the Haptic Loop: Network Degradation Limits for Haptic Task Performance,
IEEE International Symposium on Haptic Audio Visual Environments and Games, Nanchang, Jiangxi, China, Oktober 2011.