- Physically interacting humans regulate muscle coactivation to improve visuo-haptic perception. Journal of Neurophysiology, 2023 mehr… BibTeX
- Estimation of Involuntary Components of Human Arm Impedance in Multi-Joint Movements via Feedback Jerk Isolation. Frontiers in Neuroscience 14, 2020, 459 mehr… BibTeX
- Impedance-based Gaussian Processes for Modeling Human Motor Behavior in Physical and Non-physical Interaction. IEEE Transactions on Biomedical Engineering 66 (9), 2019, 2499-2511 mehr… BibTeX
- Estimation of Involuntary Impedance in Multi-joint Arm Movements. IFAC Conference on Cyber-Physical & Human Systems (CPHS), 2018 mehr… BibTeX
- Impedance-based Gaussian Processes for Predicting Human Behavior during Physical Interaction. International Conference on Robotics and Automation 2016, 2016 mehr… BibTeX
Impedance Estimation and Model‑Based Control in Human–Machine Interaction
Researcher: Satoshi Endo
Motivation
When humans perform movements, their motor output is shaped not only by planned feedforward commands but also by feedback mechanisms that maintain stability and adapt to changing conditions. These feedback components arise from intrinsic viscoelastic properties of muscles, short‑ and long‑latency reflexes, and voluntary corrections. In dynamic or unpredictable environments, rapid intrinsic and reflexive responses are critical for stability, as voluntary feedback alone is too slow.
The mechanical impedance of the limb, comprising inertia, damping, and stiffness, provides a compact description of these stabilising properties. While inertia is determined by limb kinematics, stiffness and damping can be modulated via muscle activation, allowing humans to adjust interaction dynamics proactively. Understanding and modelling this modulation is not only important for basic neuroscience but is also highly relevant for the design of variable‑impedance robotic controllers, adaptive rehabilitation devices, and human–robot collaboration strategies.
Research questions
- How can multi‑joint arm impedance be estimated accurately in natural, dynamic movements, capturing both intrinsic and reflexive components?
- How are stiffness and damping modulated in response to task demands, sensory uncertainty, or partner performance, and how can these insights be incorporated into predictive impedance models?
- How can neuromechanical knowledge be integrated into grey‑box, uncertainty‑aware learning models that combine physical principles with data‑driven adaptability?
- How can such models provide prediction confidence and identify where additional data or refined modelling is needed, enabling safer and more personalised interaction strategies?
- How can impedance‑based predictive models be embedded in adaptive robotic control frameworks for stable, responsive, and comfortable human–machine interaction in collaborative and assistive scenarios?
Approach
Our research combines precision impedance estimation, computational modelling, and model‑based control design.
- Experimental impedance estimation
- Developed a disturbance‑based framework capable of delivering short, controlled perturbations during free multi‑joint arm movements.
- Designed a single‑trial method to isolate and quantify fast, involuntary feedback components, enabling the separation of intrinsic and reflexive impedance contributions.
- Modelling impedance modulation
- Represented human movement as a stochastic dynamical system, embedding impedance parameters that vary with task context.
- Analysed transient impedance modulation strategies, such as the dynamic adjustment of muscle coactivation to balance stability, effort, and information acquisition in physical interaction.
- Identified how humans regulate impedance in multi‑agent settings to integrate visual and haptic cues optimally.
- Impedance‑based predictive control
- Developed Gaussian Process and grey‑box learning models of impedance behaviour that incorporate neuromechanical priors.
- Used these models for feedforward‑plus‑feedback control in simulated and experimental human–robot interaction tasks.
- Enabled adaptive robotic impedance tuning to match user needs, stabilise interaction, and improve comfort and safety.
Key results and achievements
- Designed and validated an experimental framework for accurate multi‑joint impedance estimation during unconstrained arm movements.
- Developed a single‑trial isolation method for intrinsic and reflexive feedback components.
- Demonstrated that muscle coactivation strategies are adapted to improve interaction stability and sensory integration with a partner.
- Created impedance‑based learning models that fuse neuromechanical insight with probabilistic prediction for adaptive control.
- Transferred estimated impedance models to human–robot interaction controllers, enabling stable, variable‑impedance behaviour in collaborative and assistive scenarios.
Human–Machine Coordination and User‑Centred Assistive Control
Researcher: Satoshi Endo
Motivation
Our research focuses on understanding and modelling human movement control in dynamic, interactive environments, with a particular emphasis on multi‑agent coordination between humans and robotic systems. We investigate how neuroscientific variables such as perception, cognition, and motor control influence the dynamics of interaction, especially when tasks require shared or alternating control.
This line of work extends naturally to the design of assistive control strategies for devices such as smart vehicles, prosthetics, and robotic aids. While semi‑autonomous controllers are often designed to maximise task performance by compensating for suboptimal human input, this may reduce the user’s sense of controllability and embodiment. From a long‑term interaction perspective, preserving the user’s agency and optimising the subjective quality of interaction are as important as improving objective task performance.
Research questions
- How do perceptual and cognitive factors influence the interpretation of another agent’s actions as intentional or erroneous?
- How do cooperative strategies evolve between human and machine agents during repeated interaction?
- How can intention recognition be modelled from interaction dynamics and perceptual cues?
- How can the quality of human‑in‑the‑loop control be assessed using psychological constructs such as embodiment?
- How can assistive control strategies be designed to enhance both task performance and user experience?
Approach
We model human behaviour as a stochastic dynamical system, studying how coordination emerges and adapts in multi‑agent settings. These human‑driven models are implemented in adaptive control strategies for robotic systems to improve synchronisation and responsiveness in human–robot interaction (HRI) tasks.
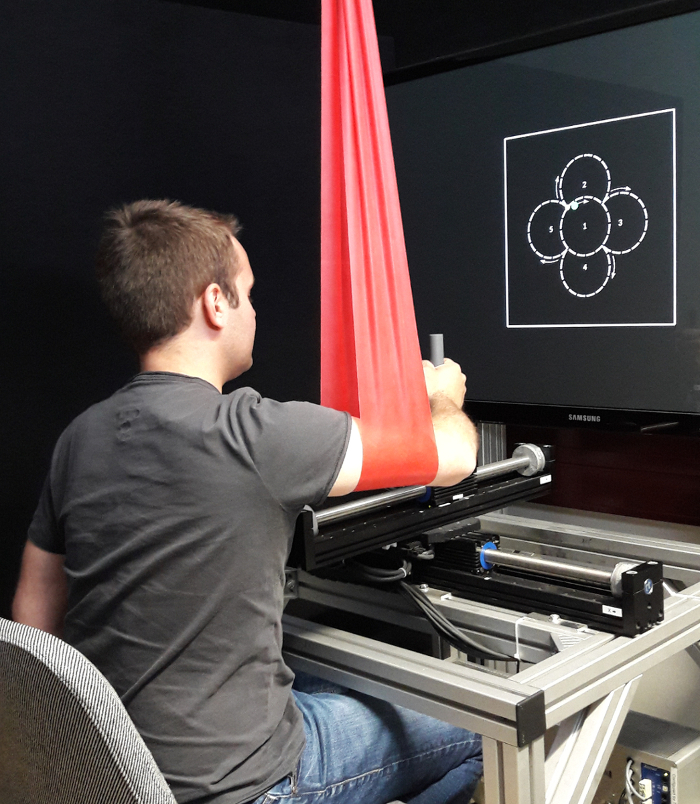
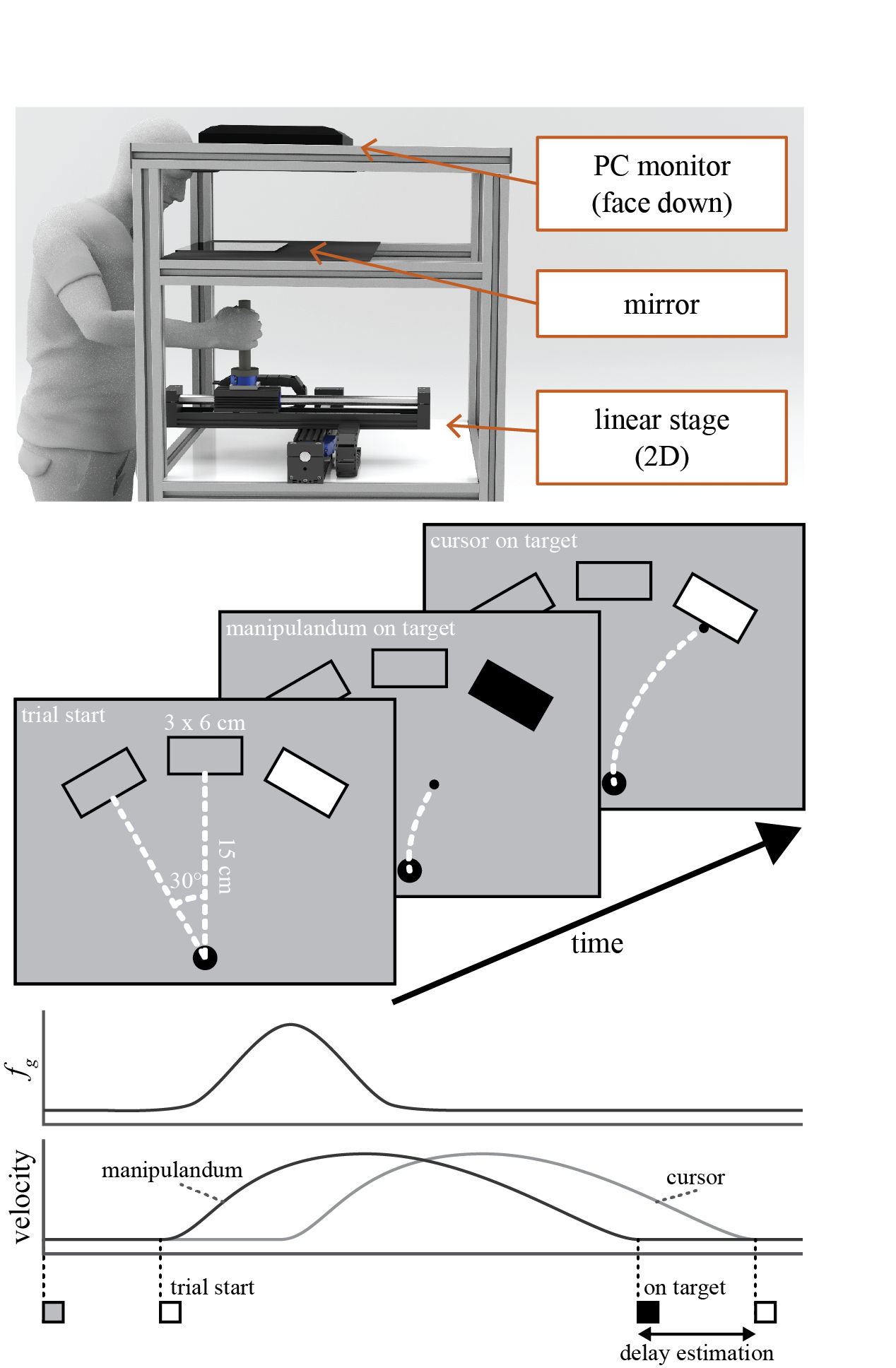
For user‑centred evaluation, we design experimental frameworks that combine haptic interfaces with immersive virtual environments to study interaction quality under different assistive control algorithms. Psychological constructs such as embodiment are used to quantify how well the autonomous component integrates into the user’s own control processes.
Key results and achievements
- Developed dynamical‑system models to statistically characterise multi‑agent coordination strategies.
- Applied bio‑inspired motion models and human‑centred coordination strategies to object manipulation in physical HRI.
- Designed a controlled experimental setup using a 2‑DoF haptic device and VR environment for human studies.
- Investigated the influence of assistive control algorithms on subjective embodiment through psychometric evaluation.
- Robotic Assistance in Medication Intake: A Complete Pipeline. Applied Sciences 12 (3), 2022 mehr… BibTeX
- Robotic Light Touch Assists Human Balance Control During Maximum Forward Reaching. Human Factors: The Journal of the Human Factors and Ergonomics Society, 2020, 001872082095053 mehr… BibTeX
- Effect of External Force on Agency in physical Human-Machine Interaction. Frontiers in Human Neuroscience 14, 2020 mehr… BibTeX
- The Effect of Skill Level Matching in Dyadic Interaction on Learning of a Tracing Task. 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), 2019 mehr… BibTeX
- Physically Plausible Wrench Decomposition for Multieffector Object Manipulation. Transaction on Robotics (34(4)), 2018, 1053-1067 mehr… BibTeX
- An embodiment paradigm in evaluation of human-in-the-loop control. IFAC Conference on Cyber-Physical & Human Systems (CPHS), 2018 mehr… BibTeX
- A Human–Robot Interaction Perspective on Assistive and Rehabilitation Robotics. Frontiers in Neurorobotics (11), 2017 mehr… BibTeX
- Object Handover Prediction using Gaussian Processes clustered with Trajectory Classification. arXiv preprint: arXiv:1707.02745, 2014 mehr… BibTeX