- Snookie: an Autonomous Underwater Vehicle with Artificial Lateral Line System – 20. In: Flow Sensing in Air and Water. Springer Berlin Heidelberg (VIII. edn.), 2014, 521-562 more… BibTeX
- Biomimetic Lateral-Line System for Underwater Vehicles. Abstracts of the 9th IEEE SENSORS CONFERENCE, 2010 more… BibTeX
- Simulation of the Underwater Vehicle “Snookie”: Navigating like a Fish. Proceedings of the 1st International Conference on Applied Bionics and Biomechanics (ICABB 2010) , 2010 more… BibTeX
- Design of a Lateral-Line Sensor for an Autonomous Underwater Vehicle. 8th IFAC International Conference on Manoeuvring and Control of Marine Craft, Elsevier BV, 2009 more… BibTeX
Bio-inspired Design
The biodiversity on earth constitutes a huge source of inspiration for innovations in technical systems. Besides the adaption to conquer habitats with diverse environmental conditions, the evolutionary race of arms through morphological changes and new abilities created systems which can often be considered as being optimal, following the Optimal Design Principle. In this field of research, we use biomimetics as a valuable source of inspiration and tool kit for robotics. Biomimetics includes the whole design process from the initial research question to the final product. The description of the process is two-fold, depending on the starting point: The top-down approach starts with a specific problem and looks for solutions, whereas bottom-up starts with the solution and looks for a technical problem to solve. In the bottom-up process, research in biology brings up an interesting property of a biological system, which is further investigated for its range of application in a technical system. The basis for this development of applications is the studying of the functional morphology, which enables certain abilities or properties of interest. As in the top-down approach, the design principles of the morphology are extracted and abstracted. Within this process, additionally collected information on the biological system can lead to an improved understanding of the previous stages of research. We investigate both approaches for bio-inspired robots.
Related projects:
Current topics:
Bio-inspired sensing and control

Researcher: Stefan Sosnowski
Motivation
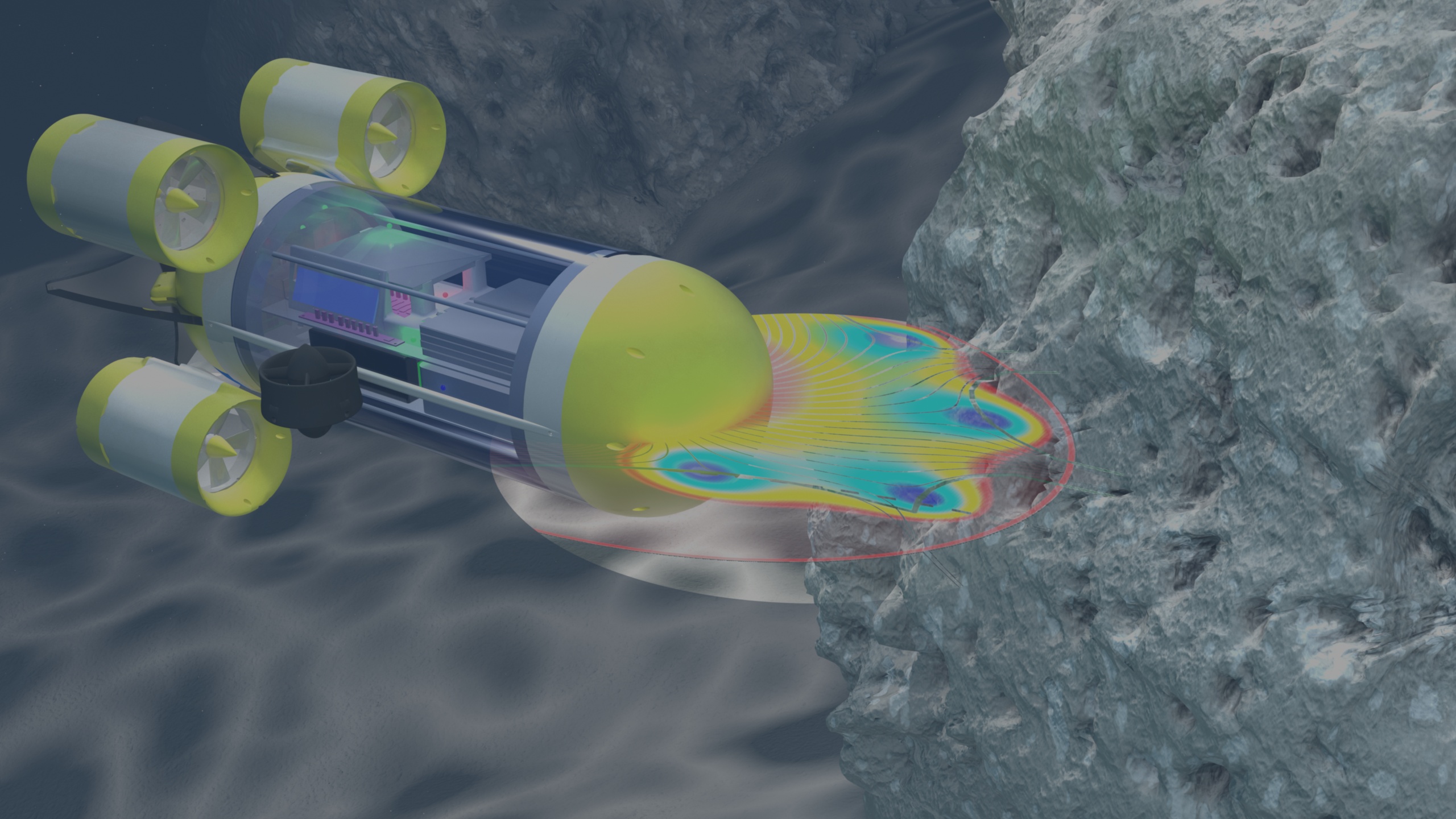
Even if completely blind fish are able to locate obstacles or avoid them under poor visual conditions. Studies on the blind cave form of Astyanax mexicanus show that these fish are able to detect and also discriminate objects, if gliding past or towards them at close distance. The example of the blind Mexican cave fish shows that it is obviously possible to make vital decisions such as object avoidance based solely on information mediated by the surrounding fluid motion. The objects are perceived by means of the lateral-line organ, which is distributed along the body of the fish and responds to the movement of the water relative to the fish's skin. The presence of objects leads to an alteration of the flow field around the fish, which creates a hydrodynamic image of the surroundings on the fish's body. Our motivation is to investigate this sensing ability and enable the robots to perform such tasks in confined environments and behaviours as observed in fish, such as obstacle detection and geometrical-shape reconstruction by means of hydrodynamic images.
Research questions
- What are sufficient and necessary flow conditions to mathematically allow fluid low perception?
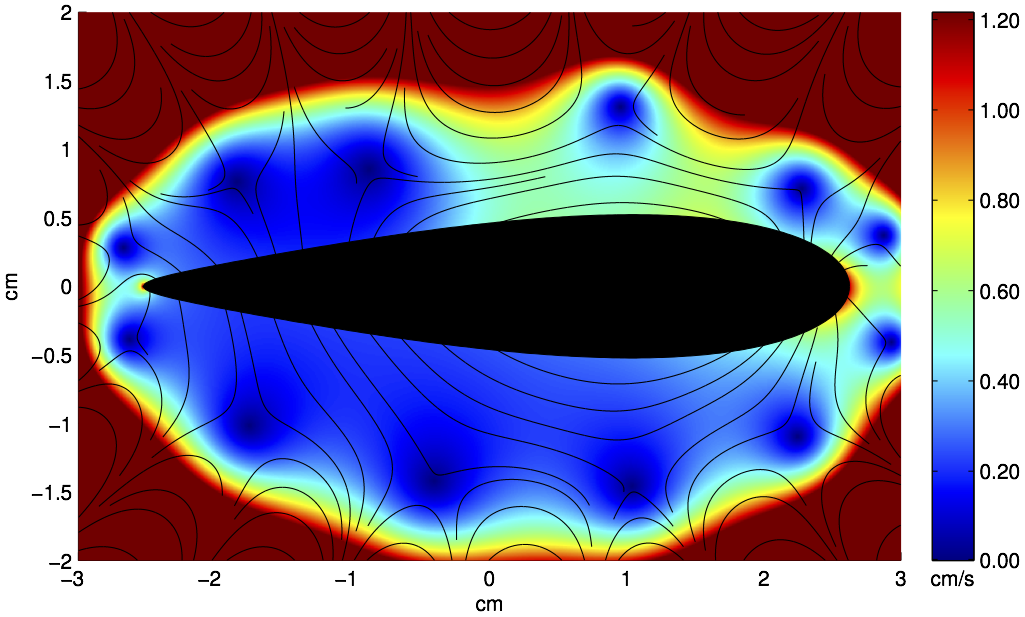
- What information about the fluid motion and the environment is present in the tangential velocity of the fluid on the surface of an object (i.e. the hydrodynamic image)?
- What statements can mathematically be made on the motion of the surrounding fluid by measurement of the the hydrodynamic image?
- How to interpret the reconstructed flow field?
- What information can be extracted about the the shape distance and velocity of boundaries?
- How to construct an computationally efficient collision avoidance heuristic?
- How to determine the forces of hydrodynamic interaction?
- How to design an artificial lateral line system of suitable geometry and precision to carry out the tasks mentioned?
Approach
The measurement of the tangential flow velocities through an artificial lateral-line (ALL) system together with the no-penetration condition (i.e. no flow can penetrate the hull), provides the robot with Cauchy boundary conditions on the surface covered by the ALL. Provided Prandtl's boundary layer approximation holds around the ALL, regions of quasi-potential flow around the ALL can be expected. Cauchy boundary conditions, on a subset of the boundary (here the ALL), are sufficient to in principle uniquely define the flow field. But, as many inverse problems, the reconstruction of the flow field from its values on the ALL is ill-posed. By suitable regularisation a sufficient -albeit small- range of view around the ALL is obtained.
Key results and achievements
- 2D reconstruction of an arbitrary shaped environment from flow perception for fish and robot bodies
- 3D reconstruction of an environment based on dipoles
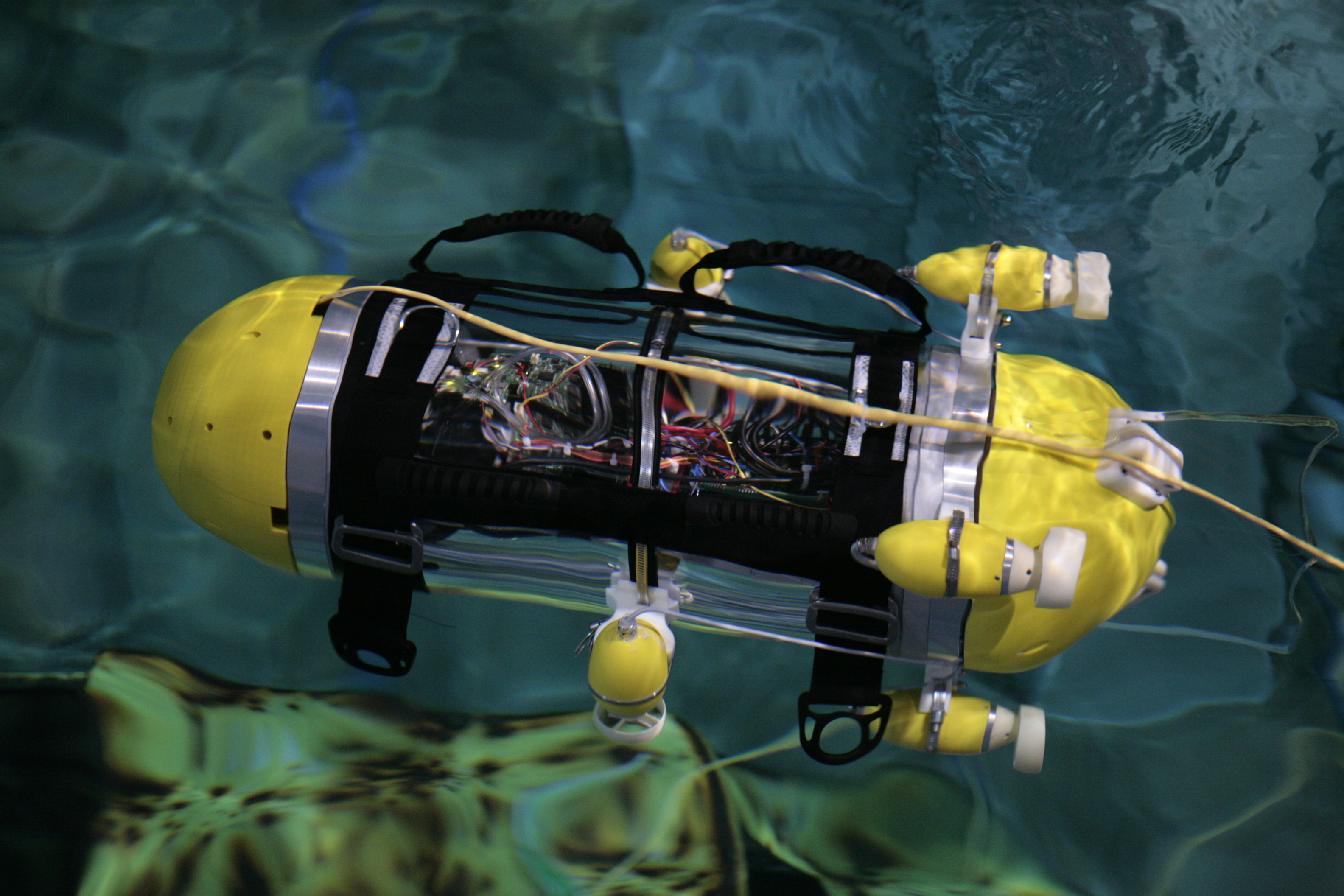
- Development of an artificial lateral-line system
- Integration on an underwater robot
- Object detection and avoidance
- SLAM navigation based on only flow data and environment reconstruction
- Multi-sensor fusion of ALL and sonar