Dr.-Ing., Department of Electrical and Computer Engineering
Safety and Efficiency in Model Predictive Control for Systems with Uncertainty
Technical University Munich, Germany (TUM)
05/2017 - 02/2022
Research Associate Chair of Automatic Control Engineering Technical University Munich, Germany (TUM)
05/2021 - 10/2021
Research Stay University of California, Berkeley, USA
04/2016 - 01/2017
Master Thesis: Influence of Flexible Wings on Flight Performance California Institute of Technology, USA
2014 - 2017
Master of Science, Electrical Engineering and Information Technology Focus: Control Theory and Automation Technology, Robotics Technical University Munich, Germany (TUM)
04/2014 - 08/2014
Bachelor Thesis: L1 Adaptive Control for Quadrocopters University of South Carolina, USA
2011 - 2014
Bachelor of Science, Electrical Engineering and Information Technology Focus: Control Theory, Electrical Machines Technical University Munich, Germany (TUM)
Research Interests
My research focuses on Model Predictive Control (MPC) and specifically Stochastic MPC with application to automated driving.
Short example videos for different projects are available here.
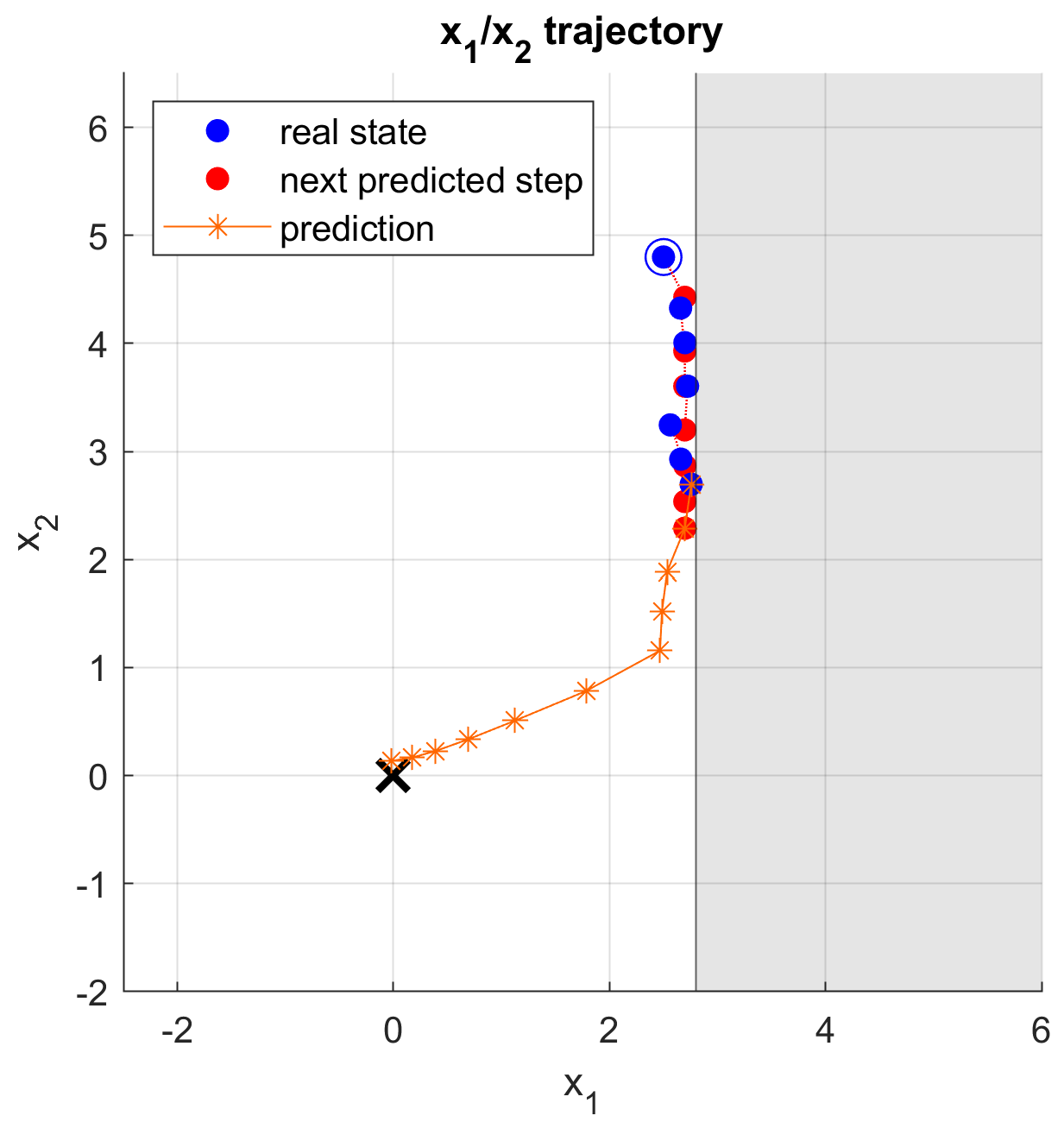
Stochastic MPC Introduction
If you are interested in Stochastic MPC, check out this simple Matlab example:
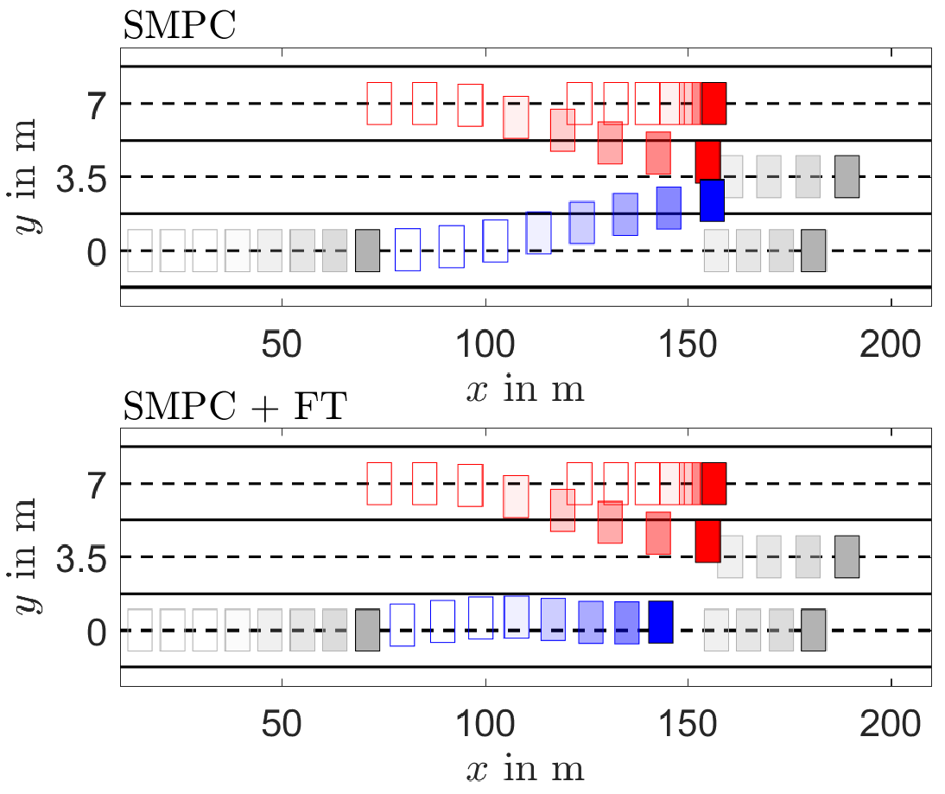
Stochastic Model Predictive Control (for autonomous driving)
Compared to SMPC, fail-safe SMPC (SMPC+FT) guarantees safety even in challenging situations.
Click to play example video (gif).
Model Predictive Control (MPC) has proved to be effective for trajectory planning. Regarding the example of autonomous driving, an optimization problem is solved to generate a vehicle trajectory for the near future. After the optimized input is applied to only the next time step, the optimization problem is solved again – but now the horizon is shifted by one step. In Stochastic MPC probabilistic constraints are formulated to efficiently account for system uncertainty.
We are currently working on improving efficiency and safety for Stochastic MPC, as well as providing guarantees for stability and recursive feasibility.
As driving takes place in environments that are not deterministic, it is necessary to account for these uncertainties, e.g. due to multiple possible maneuvers by other vehicles. For this purpose we are working on Stochastic MPC for autonomous driving in cooperation with BMW.
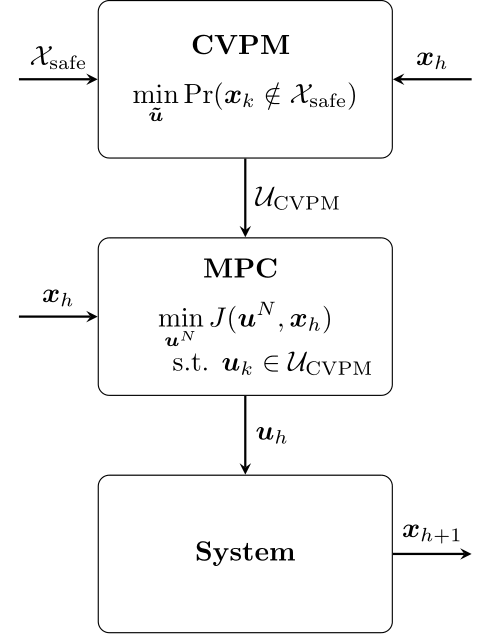
Minimizing Constraint Violation Probability in MPC
CVPM method.
System uncertainty can be handled in different ways within MPC. Robust MPC, as the name indicates, robustly accounts for the uncertainty, often resulting in conservative solutions. While Stochastic MPC yields efficient solutions, a small probability of constraint violation is permitted, based on a predefined risk parameter.
In contrast to Robust MPC and Stochastic MPC, we propose an MPC method (CVPM-MPC), which minimizes the probability that a constraint is violated while also optimizing other control objectives. The proposed method is capable of dealing with changing uncertainty and does not require to choose a risk parameter. CVPM-MPC can be reagarded as a link between Robust and Stochastic MPC.
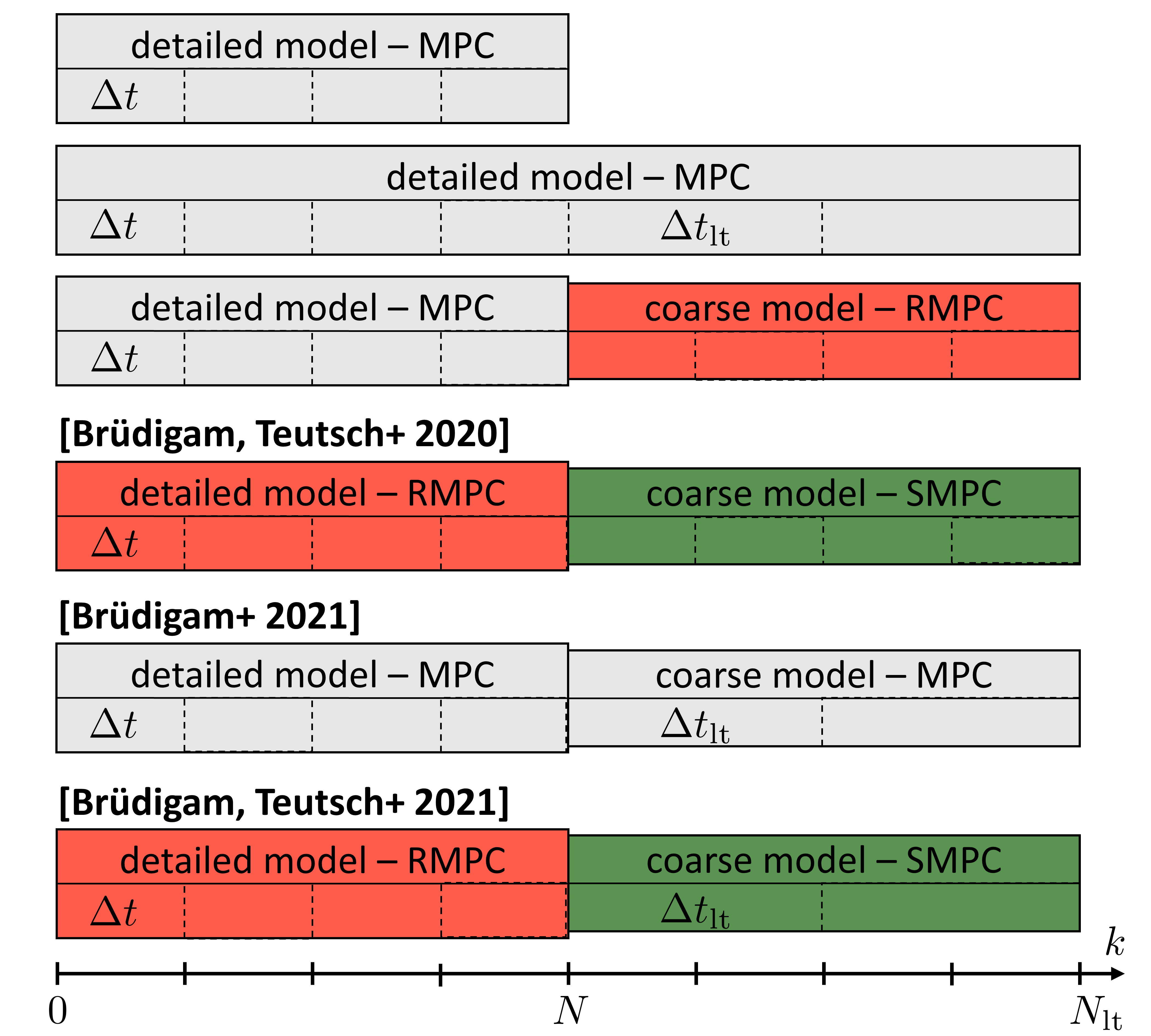
A long prediction horizon in MPC is often beneficial. However, a long prediction horizon with a detailed prediction model quickly becomes computationally challenging. We provide different adaptations to MPC in order to take advantage of long prediction horizons while keeping the computational effort manageable. In addition, these adaptations are combined with methods from Robust MPC and Stochastic MPC to account for potential model uncertainty and disturbances.
Legible Model Predictive Control for autonomous driving
Interpretation of the maneuver of the automated red vehicle.
Autonomous vehicles can assist other traffic participants in correctly predicting the autonomous vehicle’s future maneuvers. This cooperative behavior has a positive effect on traffic flow, while not increasing risk. For this reason, we developed and investigate Legible MPC to generate readable vehicle trajectories.
Publications
2024
Fink, Michael; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Minimal Constraint Violation Probability in Model Predictive Control for Linear Systems. IEEE Transactions on Automatic Control, 2024, 1-8 more…
Full text (
DOI
)
2023
Brüdigam, Tim; Olbrich, Michael; Wollherr, Dirk; Leibold, Marion: Stochastic Model Predictive Control With a Safety Guarantee for Automated Driving. IEEE Transactions on Intelligent Vehicles 8 (1), 2023, 22-36 more…
Full text (
DOI
)
Dang, Ni; Brüdigam, Tim; Zhang, Zengjie; Liu, Fangzhou; Leibold, Marion; Buss, Martin: Distributed Stochastic Model Predictive Control for a Microscopic Interactive Traffic Model. Electronics (12(6), 1270), 2023 more…
Full text (
DOI
)
Full text (mediaTUM)
Kerz, Sebastian; Teutsch, Johannes; Brüdigam, Tim; Leibold, Marion; Wollherr, Dirk: Data-Driven Tube-Based Stochastic Predictive Control. IEEE Open Journal of Control Systems , 2023 more…
Full text (
DOI
)
Full text (mediaTUM)
Teutsch, Johannes; Kerz, Sebastian; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Offline Uncertainty Sampling in Data-driven Stochastic MPC. IFAC World Congress 2023, 2023, 7 more…
Full text (mediaTUM)
2022
Benciolini, Tommaso; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Linear Safety Constraints for Urban Automated Driving: a Case Differentiation. 15th International Symposium on Advanced Vehicle Control (AVEC22), 2022 more…
Brüdigam, Tim; Jacumet, Robert; Wollherr, Dirk; Leibold, Marion: Safe Stochastic Model Predictive Control. 2022 IEEE 61st Conference on Decision and Control (CDC), IEEE, 2022 more…
Full text (
DOI
)
Dang, Ni; Brüdigam, Tim; Leibold, Marion; Buss, Martin: Combining Event-Based Maneuver Selection and MPC Based Trajectory Generation in Autonomous Driving. Electronics 11 (10), 2022 more…
Full text (
DOI
)
Full text (mediaTUM)
Fink, Michael; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Constraint Violation Probability Minimization for Norm-Constrained Linear Model Predictive Control. 2022 European Control Conference (ECC), 2022, 839-846 more…
Full text (
DOI
)
Full text (mediaTUM)
2021
Benciolini, Tommaso; Brüdigam, Tim; Leibold, Marion: Multistage Stochastic Model Predictive Control for Urban Automated Driving. 24rd IEEE International Conference on Intelligent Transportation Systems, 2021 more…
Full text (
DOI
)
Full text (mediaTUM)
Brüdigam, Tim; Capone, Alexandre; Hirche, Sandra; Wollherr, Dirk; Leibold, Marion;: Gaussian processbased stochastic model predictive control for overtaking in autonomous racing. 2021 IEEE International Conference on Robotics and Automation (ICRA) Workshop on Opportunities and Challenges with Autonomous Racing, 2021 more…
Full text (mediaTUM)
Brüdigam, Tim; Gaßmann, Victor; Wollherr, Dirk; Leibold, Marion: Minimization of Constraint Violation Probability in Model Predictive Control. Int J Robust Nonlinear Control, 2021, 1-33 more…
Full text (
DOI
)
Full text (mediaTUM)
Brüdigam, Tim; Olbrich, Michael; Wollherr, Dirk; Leibold, Marion: Stochastic Model Predictive Control with a Safety Guarantee for Automated Driving. IEEE Transactions on Intelligent Vehicles, 2021, 1-1 more…
Full text (
DOI
)
Full text (mediaTUM)
Brüdigam, Tim; Prader, Daniel; Wollherr, Dirk; Leibold, Marion: Model Predictive Control with Models of Different Granularity and a Non-uniformly Spaced Prediction Horizon. American Control Conference (ACC), 2021 more…
Full text (
DOI
)
Brüdigam, Tim; Teutsch, Johannes; Wollherr, Dirk; Leibold, Marion; Buss, Martin: Probabilistic Model Predictive Control for Extended Prediction Horizons. at - Automatisierungstechnik 69 (9), 2021, 759-770 more…
Full text (
DOI
)
Brüdigam, Tim; Zhan, Jie; Wollherr, Dirk; Leibold, Marion: Collision Avoidance with Stochastic Model Predictive Control for Systems with a Twofold Uncertainty Structure. Accepted to the 24rd IEEE International Conference on Intelligent Transportation Systems, 2021 more…
Full text (mediaTUM)
2020
Brüdigam, Tim; Teutsch, Johannes; Wollherr, Dirk; Leibold, Marion: Combined Robust and Stochastic Model Predictive Control for Models of Different Granularity. 21st IFAC World Congress, 2020 more…
Full text (
DOI
)
Full text (mediaTUM)
Brüdigam, Tim; di Luzio, Fulvio; Pallottino, Lucia; Wollherr, Dirk; Leibold, Marion: Grid-Based Stochastic Model Predictive Control for Trajectory Planning in Uncertain Environments. 2020 23rd IEEE International Conference on Intelligent Transportation Systems, 2020 more…
Full text (
DOI
)
Full text (mediaTUM)
Causevic, Vedad; Fanger, Yunis; Brüdigam, Tim; Hirche, Sandra: Information-constrained Model-Predictive Control with Application to Vehicle Platooning. 21st IFAC World Congress, 2020 more…
Full text (mediaTUM)
2018
Brüdigam, Tim; Ahmic, Kenan; Leibold, Marion; Wollherr, Dirk: Legible Model Predictive Control for Autonomous Driving on Highways. IFAC-PapersOnLine 51 (20), 2018, 215-221 more…
Full text (
DOI
)
Full text (mediaTUM)
Brüdigam, Tim; Olbrich, Michael; Leibold, Marion; Wollherr, Dirk: Combining Stochastic and Scenario Model Predictive Control to Handle Target Vehicle Uncertainty in an Autonomous Driving Highway Scenario. 2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, 1317-1324 more…
Full text (
DOI
)
Full text (mediaTUM)