Stochastic Model Predictive Control (für autonomes Fahren)
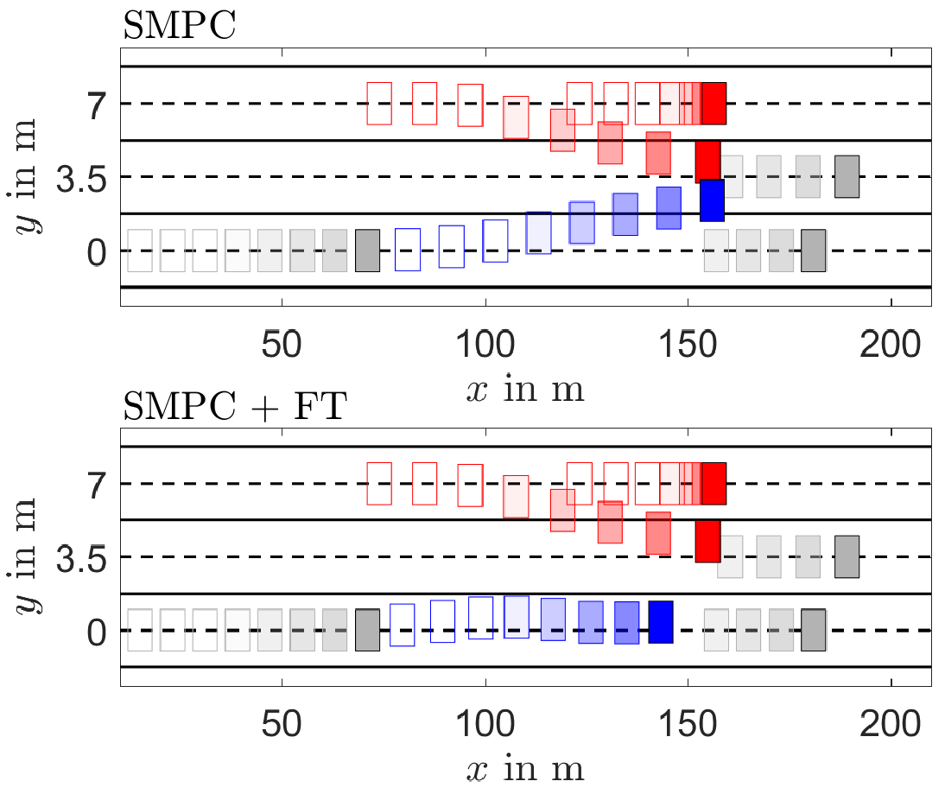
Im Gegensatz zu SMPC garantiert fehlersicheres SMPC (SMPC+FT) Sicherheit auch in schwierigen Szenarien.
Klicken für Beispielvideo (gif).
Modelprädiktive Regelung (MPC) ist eine effektive Methode zur Trajektorienplanung. Um beispielsweise eine Fahrzeugtrajektorie für die nahe Zukunft zu bestimmen, wird hierfür ein Optimierungsproblem gelöst. Nun wird nur der erste optimierte Input auf das System gegeben (die anderen Inputs vernachlässigt). Im nächsten Zeitschritt wird das Optimierungsproblem wieder von Neuem gelöst. In Stochastic MPC werden probabilistische Nebenbedingungen formuliert, die Systemunsicherheiten berücksichtigen.
Wir arbeiten aktuell einerseits an der Effizienz und Sicherheit für Stochastic MPC und andererseits an Garantien für Stabilität und Recursive Feasibility.
Da die Umgebung eines Fahrzeugs nicht perfekt vorhersehbar ist, müssen diese Unsicherheiten, z.B. durch andere Verkehrsteilnehmer, berücksichtigt werden. Um hiermit effizient umzugehen, arbeiten wir an Stochastic MPC für autonomes Fahren in Zusammenarbeit mit BMW.
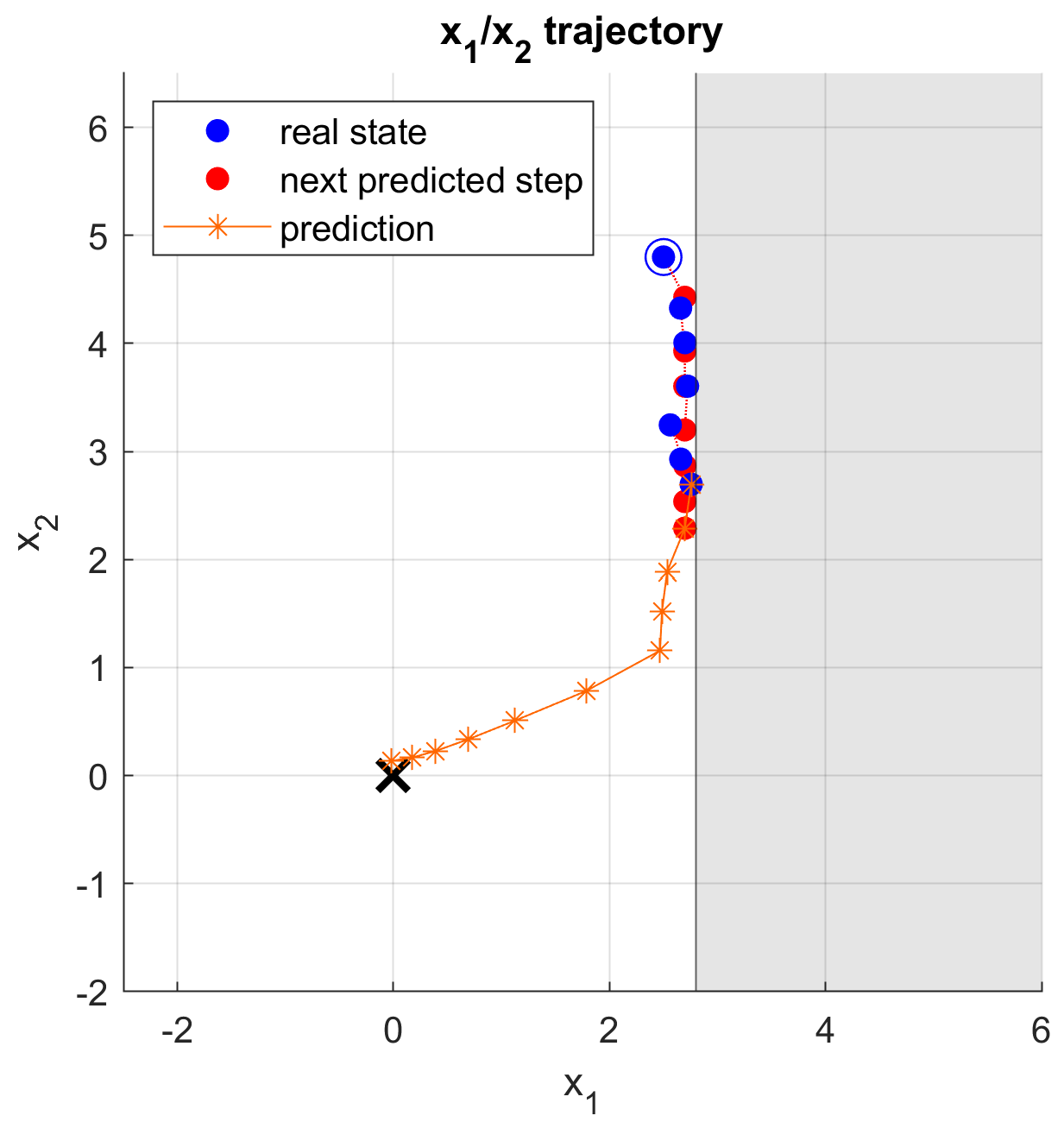
Minimierung der Wahrscheinlichkeit von verletzten Nebenbedingungen in MPC
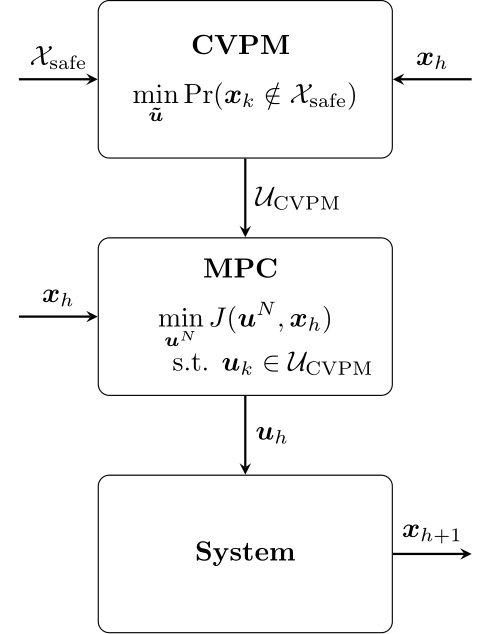
CVPM - Methode.
Systemunsicherheit kann in MPC unterschiedlich berücksichtigt werden. Robust MPC garantiert, dass Nebenbedingungen robust eingehalten werden, was oft zu konservativen Lösungen führt. Während Stochastic MPC effizientere Lösungen bietet, ist eine Verletzung der Nebenbedingungen mit einer kleinen Wahrscheinlichkeit erlaubt, abhängig von einem vorher definierten Risikoparameter.
Im Gegensatz zu Robust MPC und Stochastic MPC schlagen wir eine MPC Methode (CVPM-MPC) vor, die die Wahrscheinlichkeit für Verletzungen von Nebenbedingungen minimiert, während gleichzeitig andere Regelziele optimiert werden. Die vorgeschlagene Methode ist in der Lage dazu, mit sich ändernden Unsicherheiten umzugehen und es muss kein Risikoparameter definiert werden. CVPM-MPC kann als Brücke zwischen Robust und Stochastic MPC gesehen werden.
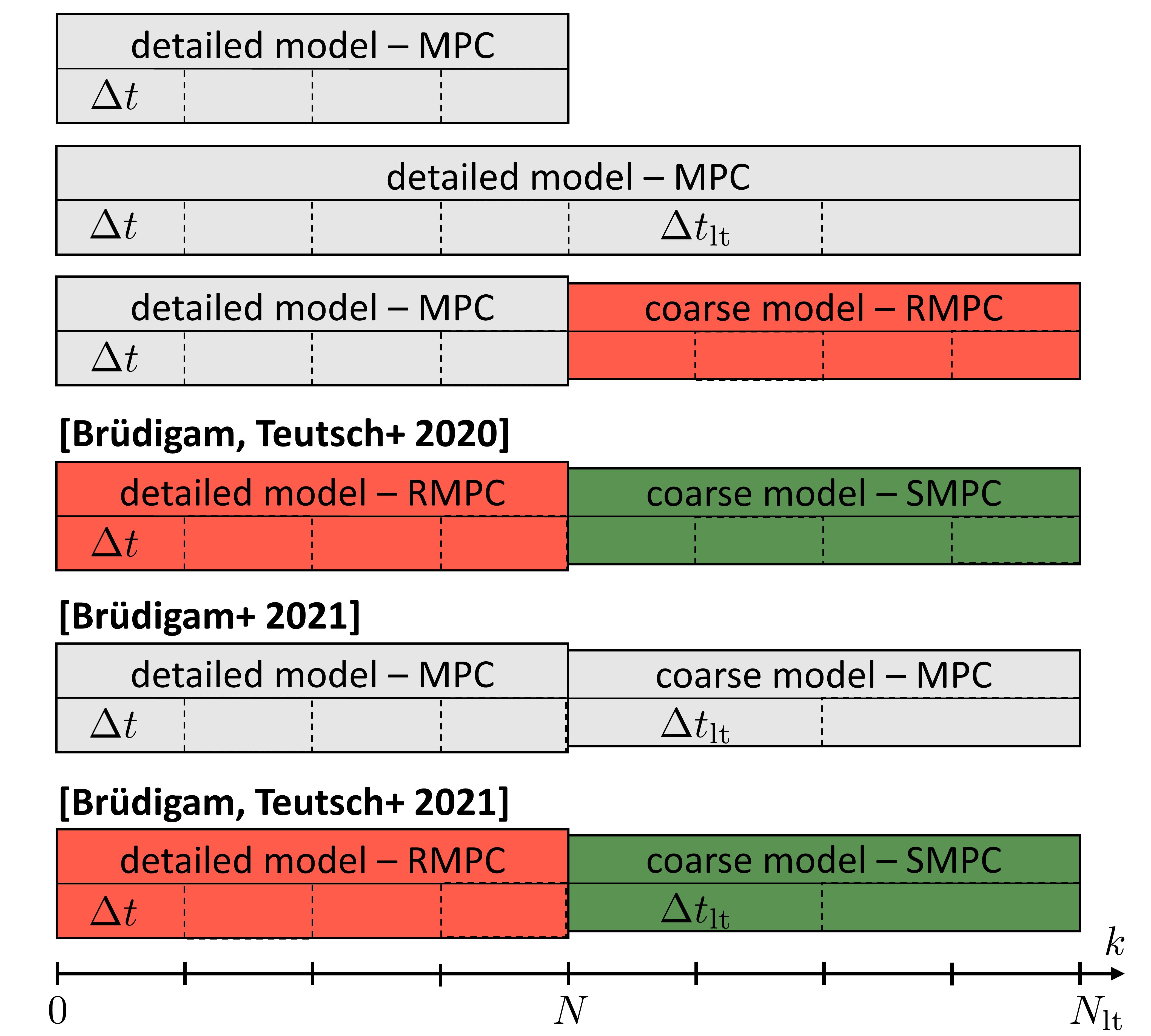
Lange Prädiktionshorizonte sind oftmals vorteilhaft in MPC. Allerdings steigt mit langen Horizonten und detaillierten Prädiktionsmodellen auch der Rechenaufwand. Wir arbeiten an Möglichkeiten, um lange MPC Horizonte zu ermöglichen, während die Rechenzeit niedrig bleibt. Diese Änderungen werden mit Methoden aus Robust MPC und Stochastic MPC kombiniert, um mit Modellunsicherheit und Störungen effektiv umzugehen.
Legible Model Predictive Control für autonomes Fahren
Interpretieren des Manövers des autonomen roten Fahrzeugs.
Autonome Fahrzeuge können anderen Verkehrsteilnehmern helfen, zukünftige Manöver des autonomen Fahrzeugs leichter zu erkennen. Dies hat einen positiven Einfluss auf den Verkehr, ohne dass ein höheres Risiko in Kauf genommen werden muss. Um dies zu ermöglichen, entwickeln und untersuchen wir Legible MPC um Fahrzeugtrajektorien zu generieren, die leicht für andere Verkehrsteilnehmer lesbar sind.
Brüdigam, Tim; Olbrich, Michael; Wollherr, Dirk; Leibold, Marion: Stochastic Model Predictive Control With a Safety Guarantee for Automated Driving. IEEE Transactions on Intelligent Vehicles 8 (1), 2023, 22-36 mehr…
Volltext (
DOI
)
Dang, Ni; Brüdigam, Tim; Zhang, Zengjie; Liu, Fangzhou; Leibold, Marion; Buss, Martin: Distributed Stochastic Model Predictive Control for a Microscopic Interactive Traffic Model. Electronics (12(6), 1270), 2023 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Kerz, Sebastian; Teutsch, Johannes; Brüdigam, Tim; Leibold, Marion; Wollherr, Dirk: Data-Driven Tube-Based Stochastic Predictive Control. IEEE Open Journal of Control Systems , 2023 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Teutsch, Johannes; Kerz, Sebastian; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Offline Uncertainty Sampling in Data-driven Stochastic MPC. IFAC World Congress 2023, 2023, 7 mehr…
Volltext (mediaTUM)
2022
Benciolini, Tommaso; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Linear Safety Constraints for Urban Automated Driving: a Case Differentiation. 15th International Symposium on Advanced Vehicle Control (AVEC22), 2022 mehr…
Dang, Ni; Brüdigam, Tim; Leibold, Marion; Buss, Martin: Combining Event-Based Maneuver Selection and MPC Based Trajectory Generation in Autonomous Driving. Electronics 11 (10), 2022 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Fink, Michael; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Constraint Violation Probability Minimization for Norm-Constrained Linear Model Predictive Control. 2022 European Control Conference (ECC), 2022, 839-846 mehr…
Volltext (
DOI
)
2021
Benciolini, Tommaso; Brüdigam, Tim; Leibold, Marion: Multistage Stochastic Model Predictive Control for Urban Automated Driving. 24rd IEEE International Conference on Intelligent Transportation Systems, 2021 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Brüdigam, Tim; Capone, Alexandre; Hirche, Sandra; Wollherr, Dirk; Leibold, Marion;: Gaussian processbased stochastic model predictive control for overtaking in autonomous racing. 2021 IEEE International Conference on Robotics and Automation (ICRA) Workshop on Opportunities and Challenges with Autonomous Racing, 2021 mehr…
Volltext (mediaTUM)
Brüdigam, Tim; Gaßmann, Victor; Wollherr, Dirk; Leibold, Marion: Minimization of Constraint Violation Probability in Model Predictive Control. Int J Robust Nonlinear Control, 2021, 1-33 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Brüdigam, Tim; Olbrich, Michael; Wollherr, Dirk; Leibold, Marion: Stochastic Model Predictive Control with a Safety Guarantee for Automated Driving. IEEE Transactions on Intelligent Vehicles, 2021, 1-1 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Brüdigam, Tim; Prader, Daniel; Wollherr, Dirk; Leibold, Marion: Model Predictive Control with Models of Different Granularity and a Non-uniformly Spaced Prediction Horizon. American Control Conference (ACC), 2021 mehr…
Volltext (
DOI
)
Brüdigam, Tim; Teutsch, Johannes; Wollherr, Dirk; Leibold, Marion; Buss, Martin: Probabilistic Model Predictive Control for Extended Prediction Horizons. at - Automatisierungstechnik 69 (9), 2021, 759-770 mehr…
Volltext (
DOI
)
Brüdigam, Tim; Zhan, Jie; Wollherr, Dirk; Leibold, Marion: Collision Avoidance with Stochastic Model Predictive Control for Systems with a Twofold Uncertainty Structure. Accepted to the 24rd IEEE International Conference on Intelligent Transportation Systems, 2021 mehr…
Volltext (mediaTUM)
2020
Brüdigam, Tim; Teutsch, Johannes; Wollherr, Dirk; Leibold, Marion: Combined Robust and Stochastic Model Predictive Control for Models of Different Granularity. 21st IFAC World Congress, 2020 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Brüdigam, Tim; di Luzio, Fulvio; Pallottino, Lucia; Wollherr, Dirk; Leibold, Marion: Grid-Based Stochastic Model Predictive Control for Trajectory Planning in Uncertain Environments. 2020 23rd IEEE International Conference on Intelligent Transportation Systems, 2020 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Causevic, Vedad; Fanger, Yunis; Brüdigam, Tim; Hirche, Sandra: Information-constrained Model-Predictive Control with Application to Vehicle Platooning. 21st IFAC World Congress, 2020 mehr…
Volltext (mediaTUM)
2018
Brüdigam, Tim; Ahmic, Kenan; Leibold, Marion; Wollherr, Dirk: Legible Model Predictive Control for Autonomous Driving on Highways. IFAC-PapersOnLine 51 (20), 2018, 215-221 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)
Brüdigam, Tim; Olbrich, Michael; Leibold, Marion; Wollherr, Dirk: Combining Stochastic and Scenario Model Predictive Control to Handle Target Vehicle Uncertainty in an Autonomous Driving Highway Scenario. 2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, 1317-1324 mehr…
Volltext (
DOI
)
Volltext (mediaTUM)