Research Assistant Chair of Automatic Control Engineering Technical University Munich, Germany (TUM)
2018 – 2020
Master of Science, Electrical Engineering and Information Technology Focus: Automation and Robotics Technical University Munich, Germany (TUM)
2014 – 2018
Bachelor of Engineering, Electrical Engineering and Information Technology University of Applied Sciences Landshut, Germany
Research Interests
Model Predictive Control
Stochastic Model Predictive Control
Robust Model Predictive Control
Optimal Control
Minimizing Constraint Violation Probability in MPC
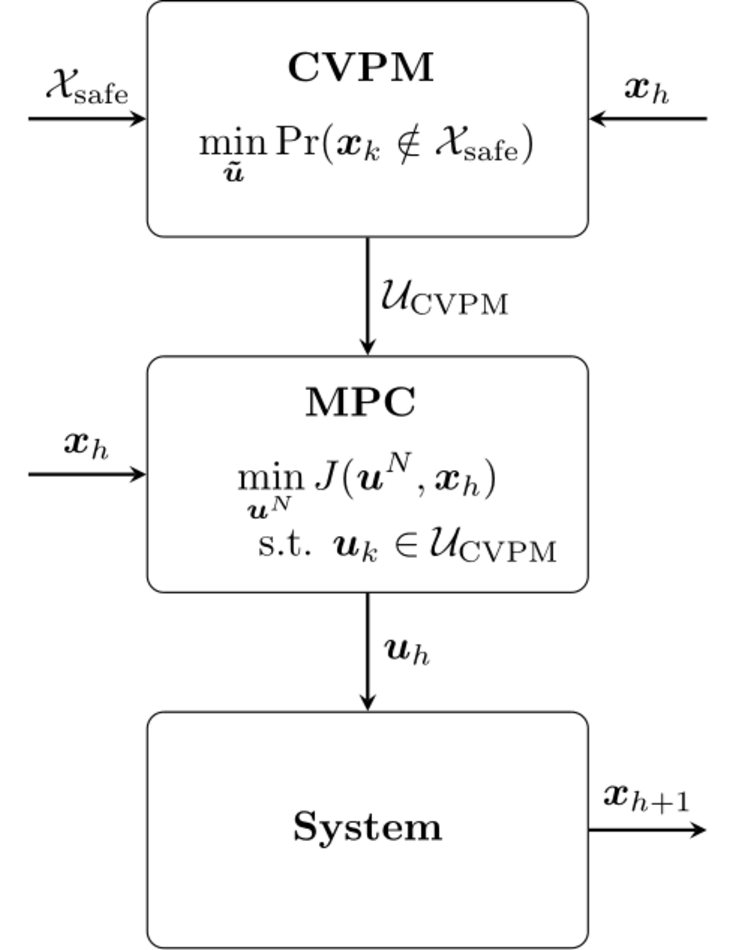
System uncertainty can be handled in different ways within MPC. Robust MPC, as the name indicates, robustly accounts for the uncertainty, often resulting in conservative solutions. While Stochastic MPC yields efficient solutions, a small probability of constraint violation is permitted based on a predefined risk parameter.
In contrast to Robust MPC and Stochastic MPC, we propose an MPC method (CVPM-MPC), which minimizes the probability that a constraint is violated while also optimizing other control objectives. The proposed method is capable of dealing with changing uncertainty and does not require choosing a risk parameter. CVPM-MPC can be regarded as a link between Robust and Stochastic MPC.
One promising application for the CVPM-MPC method is in the field of autonomous driving. In this context, the constraint violation probability directly correlates to the risk of collision, making the need for a method that minimizes this probability crucial.
Optimal Control for Crops in Vertical Farms
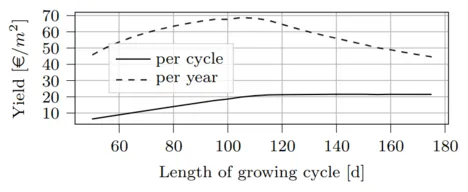
Exemplary comparison between yield per year and yield per growing cycle.
This research area focuses on enhancing the efficiency and productivity of vertical farming through optimal control strategies. Vertical farming offers year-round cultivation by maintaining optimal growing conditions, leading to faster crop maturity and higher yields than traditional farming. However, it faces challenges such as high energy consumption. The research aims to optimize the growth of different crops (e.g., wheat, tomatoes, etc.) by adjusting inputs like water, radiation, and temperature and by determining the optimal growth period duration to maximize yearly yields. By employing a nonlinear, discrete-time hybrid model, we seek to balance resource use, yield profit, and growth period, demonstrating the significant potential of control theory in improving vertical farming practices.
Student Theses
If you are interested in my research and are looking for an internship or thesis, please feel free to contact me. Please let me know which topics you are interested in and when you would like to start. In order to find a topic that fits your knowledge and skills, please also send me your current grade report and, if possible, your CV (PDF).
Publications
2025
Fink, Michael; Daniels, Annalena; García-Mañas, Francisco; Rodríguez, Francisco; Leibold, Marion; Wollherr, Dirk: Learning-based model identification for greenhouse climate control. at - Automatisierungstechnik 73 (6), 2025, 451-465 more…
Full text (
DOI
)
2024
Benciolini, Tommaso; Fink, Michael; Güzelkaya, Nehir; Wollherr, Dirk; Leibold, Marion: Safe and Non-Conservative Trajectory Planning for Autonomous Driving Handling Unanticipated Behaviors of Traffic Participants. Accepted to the 27th IEEE International Conference on Intelligent Transportation Systems, 2024 more…
Full text (mediaTUM)
Daniels, Annalena; Fink, Michael; Wollherr, Dirk: Hierarchical Model-Based Irrigation Control for Vertical Farms. IFAC-PapersOnLine 58 (7), 2024, 472-477 more…
Full text (
DOI
)
Full text (mediaTUM)
Fink, Michael; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Minimal Constraint Violation Probability in Model Predictive Control for Linear Systems. IEEE Transactions on Automatic Control, 2024, 1-8 more…
Full text (
DOI
)
Fink, Michael; Wollherr, Dirk; Leibold, Marion: Stochastic Model Predictive Control With Minimal Constraint Violation Probability for Time-Variant Chance Constraints. IEEE Control Systems Letters 8, 2024, 1385-1390 more…
Full text (
DOI
)
2023
Daniels, Annalena; Fink, Michael; Leibold, Marion; Wollherr, Dirk; Asseng, Senthold: Optimal Control for Indoor Vertical Farms Based on Crop Growth. IFAC-PapersOnLine 56 (2), 2023, 9887-9893 more…
Full text (
DOI
)
Fink, Michael; Daniels, Annalena; Qian, Cheng; Velásquez, Víctor Martínez; Salotra, Sahil; Wollherr, Dirk: Comparison of Dynamic Tomato Growth Models for Optimal Control in Greenhouses. 2023 IEEE International Conference on Agrosystem Engineering, Technology & Applications (AGRETA), IEEE, 2023 more…
Full text (
DOI
)
2022
Fink, Michael; Brüdigam, Tim; Wollherr, Dirk; Leibold, Marion: Constraint Violation Probability Minimization for Norm-Constrained Linear Model Predictive Control. 2022 European Control Conference (ECC), 2022, 839-846 more…
Full text (
DOI
)
Full text (mediaTUM)