
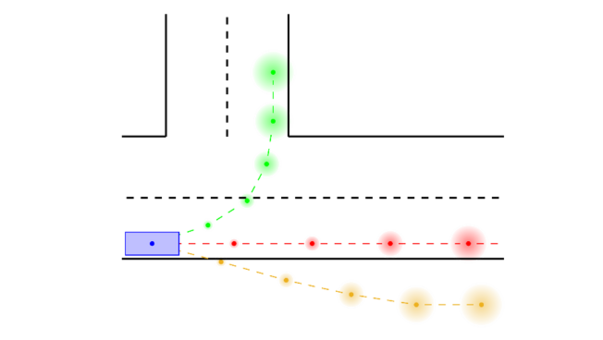
Planning and Control in Autonomous Driving

Human-Robot Joint Manipulation
Safe Learning Control
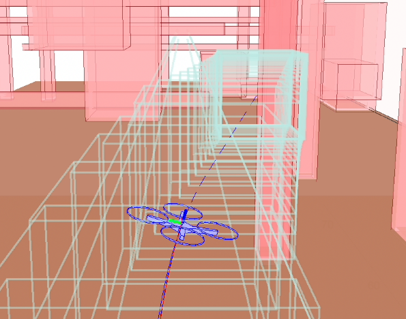
Stochastic MPC-based Motion Planning
EU Project HR Recycler
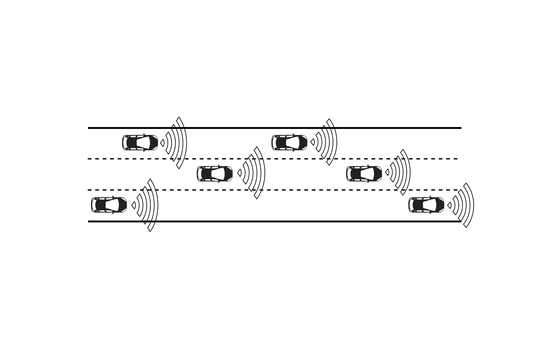
Multi-Vehicle Coupled Systems
Social Dynamics
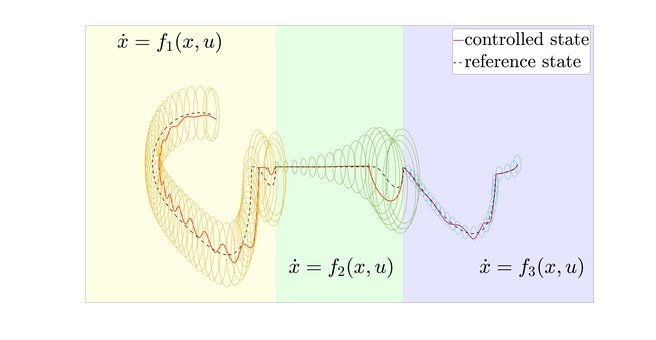
Constrained Adaptive Control
Slide 1 of 8
We are involved in research and teaching in the areas of automatic control theory and automation with application in robotics. Our research mainly focuses on:
- Nonlinear control
- Optimal, adaptive and robust control
- Distributed control systems
- System identification and machine learning in control
These methods are evaluated and applied in the following application fields:
- Autonomous driving
- Human-robot interaction and collaboration
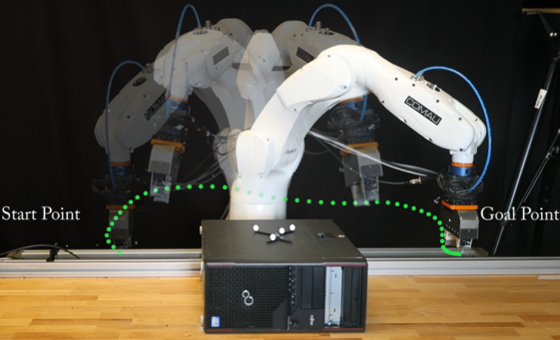
- Robot motion and manipulation in dynamic environments
- Social networks
- Automation in plant growth