- A Robust Model Predictive Control Method for Networked Control Systems. 2024 IEEE 63rd Conference on Decision and Control (CDC), IEEE, 2024, 6896-6903 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)

M.Sc. Severin Beger
Technische Universität München
Lehrstuhl für Informationstechnische Regelung (Prof. Hirche)
- Tel.: +49 89 289 25739
- E-Mail: severin.beger@tum.de
Kurze Biografie
| Seit 06/2022 | Wissenschaftlicher Mitarbeiter Lehstuhl für Informations-orientierte Regelung Technische Universität München |
| 04/2019 - 04/2022 | M.Sc. Mechatronik und Robotik Masterarbeit: Automation of the System Identification of a Solid State MEMS Mirror (bei Blickfeld GmbH) |
| 10/2015 - 04/2019 | B.Sc. Maschinenwesen Bachelorarbeit: Schwarmbildung von dynamischen Multiagentensystemen |
Forschungsinteressen
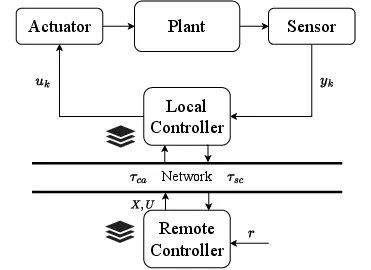
- Vernetzte Regelungssysteme
- Prädiktive Regelungsmethoden zur Kompensation von Kommunikationsstörungen (Verzögerungen, Packetverluste
- Redundanz und Sicher für über ein Netzwerk geregelte Systeme,z.B. mittels Control Barrier Functions
- Online Learning für Systeme mit Netzwerkkomponente
- Architekturen komplexer vernetzter Regelungssysteme
- Exoskelett Regelung
- Impedanz and Admittanz Regelung
- Design eines Ellbogen-Exoskeletts
- Regelung von Exoskeletten über ein Netzwerk
Studentische Arbeiten
Ich bin stets auf der Suche nach motivierten Studierenden, die an meiner Forschung interessiert sind. Die Themen sind in der Regel in einem der Gebiete Optimal Control, Learning Control, Networked Control oder Robotics angesiedelt.
Schreiben Sie mir gerne eine E-Mail, wenn Sie an einer studentischen Arbeit (z.B. Bachelor- oder Masterarbeit) unter meiner Betreuung interessiert sind, auch wenn gerade keine Arbeiten ausgeschrieben sind.
Bitte geben Sie hierbei den gewünschten Starttermin an und fügen Sie Ihren Lebenslauf und einen aktuellen Leistungsnachweis an, damit ich ein Thema passend zu Ihrem Hintergrund auswählen kann.
Derzeit ausgeschriebene Arbeiten
Zur Zeit habe ich leider keine offenen Themen. Sie können sich aber gerne initiativ bei mir bewerben!
Laufende Arbeiten
- Yuling Chen: Where to Put Safety: Control Barrier Functions in Networked Predictive Controls Systems (Masterarbeit)
- Sven Rosenberger: Learning-Based Model Predictive Control for the Cyberrunner (Masterarbeit)
Abgeschlossene Arbeiten
- Antonio Steiger: Structured COntroller Desgin for Networks with Delay using System Level Synthesis (Masterarbeit)
- Yihui Lin: Ideal Delay Bounds in Networked Predictive Control (Masterarbeit)
- Haiyang Zhang: Implementation and Evaluation of a Drone Landing Scenario on a Moving Target (Ingenieurspraxis)
- Zara Zhotabayeva: Torque Data Fusion of a Local Sensor and a Learning-Based Momentum Observer (Bachelorarbeit)
- Felix Schmid-Linendmayer: An Assistive Hybrid EMG-Torque Control Framework for Upper Limb Exoskeletons (Masterarbeit)
- Simon Schlosser: Experimental Evaluation of Momentum Observers in Force-Controlled Robotic Systems (Forschungspraxis)
- Antonio Steiger: Understanding the Advantages of Layered Control over Networks (Forschungspraxis)
- Tim Schmitz: Cyberrunner: Building a Benchmarksystem for Learning-Based Control (Bachelor Arbeit)
- Haiyang Zhang: Landing a Quadcopter on a Moving Target under Communication Constraints (Bachelor Arbeit)
- Yuling Chen: Control Barrier Functions as Safety Filters for In-Network Control Systems (Forschungspraxis)
- Yihui Lin: Network adaptive MPC for systems under communication constraints (Forschungspraxis)
- André Vencovsky: Whole-Body Observer-Based Impedance Control for a Lower-Limb Exoskeleton (Forschungspraxis)
- Nejla Selimovic: Predictive Networked Control with Redundancy (Bachelorarbeit)
- Vincenzo Di Cosmo: Design and Analysis of an Observer-based Impedance Controller for Human-Robot Interaction with an Exoskeleton (Masterarbeit)
- Maximilian Henghuber: Improving the Admittance Control of a 1-DoF Elbow Exoskeleton through Nonlinear Friction Compensation (Bachelorarbeit)
- Aziz Jouili: Assembly and Control System Implementation of an Upper-limb Exoskeleton "EduExo Pro" (Ingenieurspraxis)
- Ryan Winterhalter: ModExo - Embedded Design of an Elbow Exoskeleton (externe Arbeit)
- Felix Schmid-Lindenmayer: Design, Implementation and Analysis of a Networked Control Method for a 1-DoF Exoskeleton (Bachelorarbeit)
- Yuchen Cai: Development of a Model Predictive Control Method for an Uncertain In-Network Robotic Control System (Bachelorarbeit)
- Simon Schlosser: Design and Simulation of an Iterative LQG Controller for a Distributed Robotic System (Bachelorarbeit)
Danke euch allen für eure fantastische Arbeit!