(keine Einträge)
Career and Jobs
For Graduates & Professionals
Student Projects & Jobs
Multifingered Robot Hand Simulation and Control
Human-Robot Interaction
Project description:
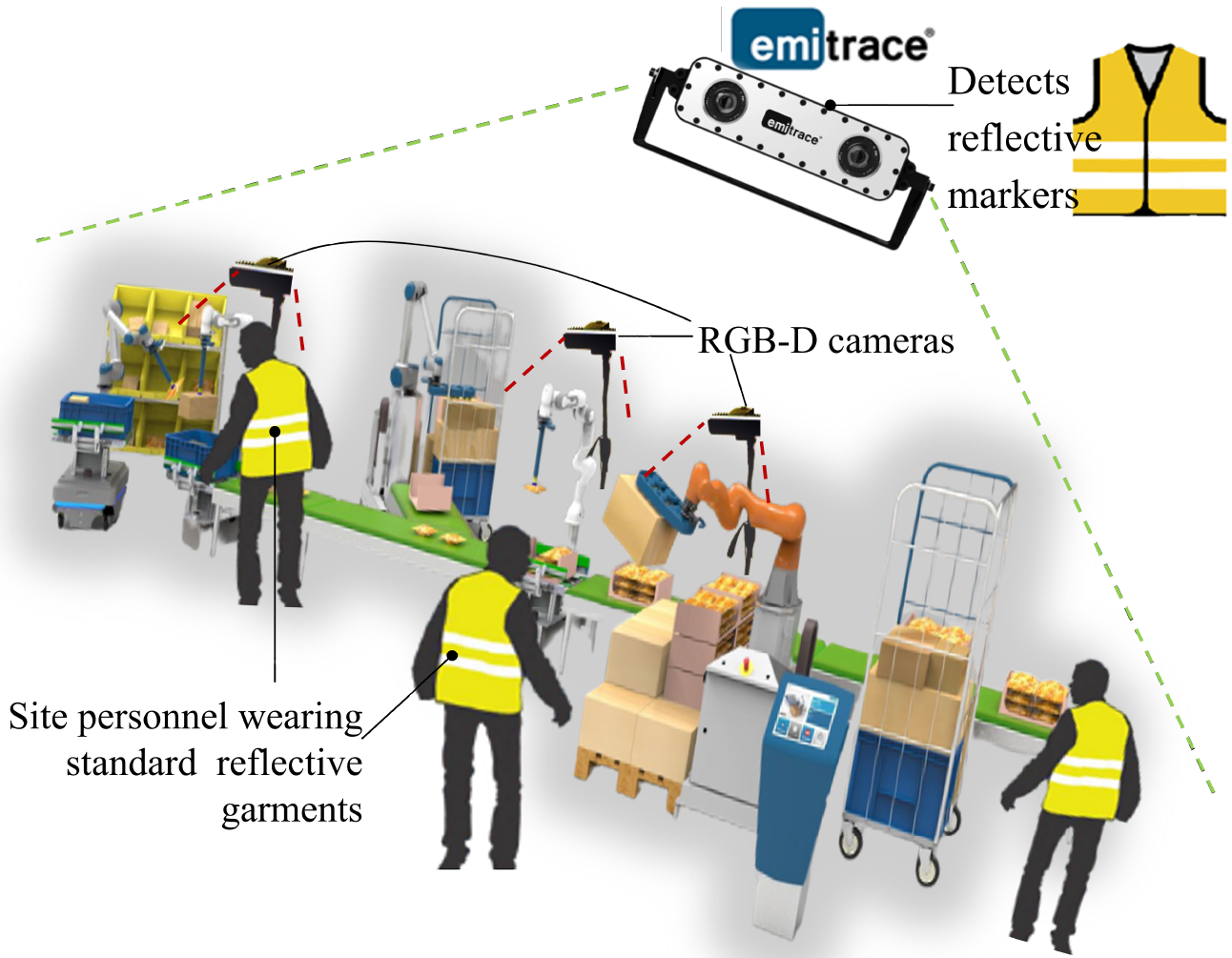
As robotics continues to evolve, there is a critical need for robust vision-guided safety approaches that effectively integrate human visual tracking methods to ensure compliance with current safety standards and operational guidelines in collaborative and shared environments. Achieving this requires precise human pose tracking, which forms the basis for safety algorithms that enable robots to dynamically adapt to human movements while maintaining task performance. However, high tracking accuracy often comes at high costs, including complex sensor fusion setups that must integrate multiple camera inputs with human motion models. The latter can be further guided by task-specific knowledge and requirements. To address this challenge, this project focuses on developing robust, scalable human tracking approaches that balance the accuracy, cost, and complexity of human motion tracking setups.
Within the context of our ongoing research, you will have the opportunity to collaborate with experienced researchers at our lab, gaining hands-on experience with different camera systems, pose tracking algorithms and real robots. This opportunity will allow you to expand your robotics development and programming skills while contributing to cutting-edge research in safe human-robot collaboration.
Possible topics to be addressed within the scope of the project:
- Markerless human pose tracking solutions and reconstruction frameworks against marker-based MoCap system (using Vicon MoCap as reference ground truth)
- Performance evaluation of multiple commercial RGB-D cameras and open-source tracking solutions for the motion tracking of human body landmark points
- Proposal of suitable visual sensor fusion approaches for merging the pose tracking outputs and improving its performance
- Development of human motion model(s) and its synchronization with the sensor fusion estimations
- Quantification of safe performance trade-offs vs. visual tracking errors
Prerequisites:
- Master-level studies in Electrical Engineering, Informatics, Computer Science or any relevant programme
- Working knowledge of computer vision and camera-based systems
- Practical experience with ROS, with good C++/Python programming skills
- Good knowledge of state estimation and sensor fusion algorithms (e.g., Kalman Filter)
- Proficiency with MATLAB/Simulink
- Ability to work in a well-structured and organized manner
Work places:
- Georg-Brauchle-Ring 60-62, 80992 München
- Carl-Zeiss-Straße 8, 85748 Garching bei München
Contact info:
- Mazin Hamad, M.Sc. (mazin.hamad@tum.de)
- Dr. Samuel Kangwagye (s.kangwagye@tum.de)
Robot Control

Project description:
A critical factor in agile production is the efficient flow of material, also known as intralogistics. Although very promising as a flexible component in intralogistics chains, robotics has not yet found its way into agile production. Especially for operation alongside humans, current robots lack the required high degree of flexibility, capability, cost-effectiveness and safety. We are currently developing cutting-edge agile production robotic systems to execute highly dynamic yet efficient motions and manipulation tasks. These systems will have predictive planning capabilities, which allow safe and efficient operation within unknown, changing environments shared with humans. They must meet the following objectives in terms of efficiency in manipulation and human-robot co-production:
- Dynamic whole-body motion/manipulation capabilities
- Risk-aware motion planning and safety
- Energy efficiency
- Human-like performance
Within the context of this project, you will have the opportunity to collaborate with experienced researchers at our lab. Furthermore, this position also allows you to improve your robotics development and programming skills by working on a mobile robotic manipulator system.
Possible topics to be addressed within the scope of the project:
- Modular whole-body dynamic modeling and identification
- Whole-body motion control of wheeled mobile manipulators
- Safety issues emerging from mobile robots navigating in industrial environments
- Human safety in collaboration with mobile manipulation systems in industrial use-cases
Prerequisites:
- Master-level studies in Electrical Engineering, Informatics, Computer Science or any relevant programme
- Good knowledge of robotics software development, especially dynamics, motion planning and control.
- Practical experience with ROS (hands-on experience/previous projects with Franka Emika robot arm is a plus)
- Excellent C++ programming skills
- Proficiency with Matlab/Simulink
- Ability to work well structured and organized
Work places:
- Georg-Brauchle-Ring 60-62, 80992 München
- Carl-Zeiss-Straße 8, 85748 Garching bei München
Contact info:
- Mazin Hamad, M.Sc. (mazin.hamad@tum.de)
- Dr. Samuel Kangwagye (s.kangwagye@tum.de)
Telepresence
Human modeling
Brain Computer Interface Systems
Robot Learning
Electronics
Mechatronics System Developement
Studentische Hilfskräfte (HiWi)
Andere Kategorien
Data Protection Information
When you apply for a position with the Technical University of Munich (TUM), you are submitting personal information. With regard to personal information, please take note of the Datenschutzhinweise gemäß Art. 13 Datenschutz-Grundverordnung (DSGVO) zur Erhebung und Verarbeitung von personenbezogenen Daten im Rahmen Ihrer Bewerbung. (data protection information on collecting and processing personal data contained in your application in accordance with Art. 13 of the General Data Protection Regulation (GDPR)). By submitting your application, you confirm that you have acknowledged the above data protection information of TUM.