Who we are
The TUM Munich Institute of Robotics and Machine Intelligence (MIRMI) is a globally visible interdisciplinary research centre for machine intelligence, which is the integration of robotics, artificial intelligence and perception. Its four central innovation sectors are the future of health, the future of work, the future of the environment, and the future of mobility. More than 60 professors from various TUM faculties cooperate within the framework of MIRMI.
The Robot Learning Lab at MIRMI is part of the chair of Robotics and System Intelligence (Lehrstuhl für Robotik und Systemintelligenz) led by Prof. Sami Haddadin.
What we do
We aim at developing novel methods to make robots capable of learning generalizable and shareable skills in the real world. Our research topics span robot manipulation, physics-informed machine learning, optimal control, and reinforcement learning. Our main research projects at the moment are aligned with the innovation sector of the Future of Work. We focus on developing novel methods and solutions to address open questions in real-world applications, typically in AI-enabled and robotised factories.
Student projects available (winter semester 2023-24)
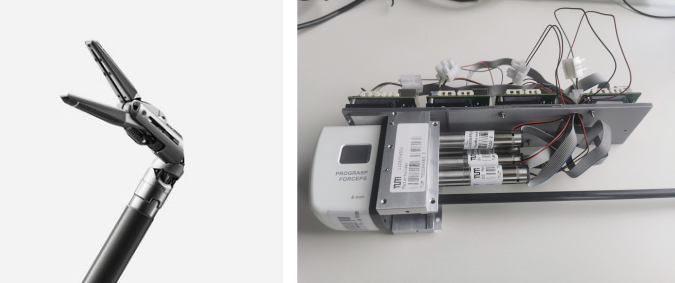
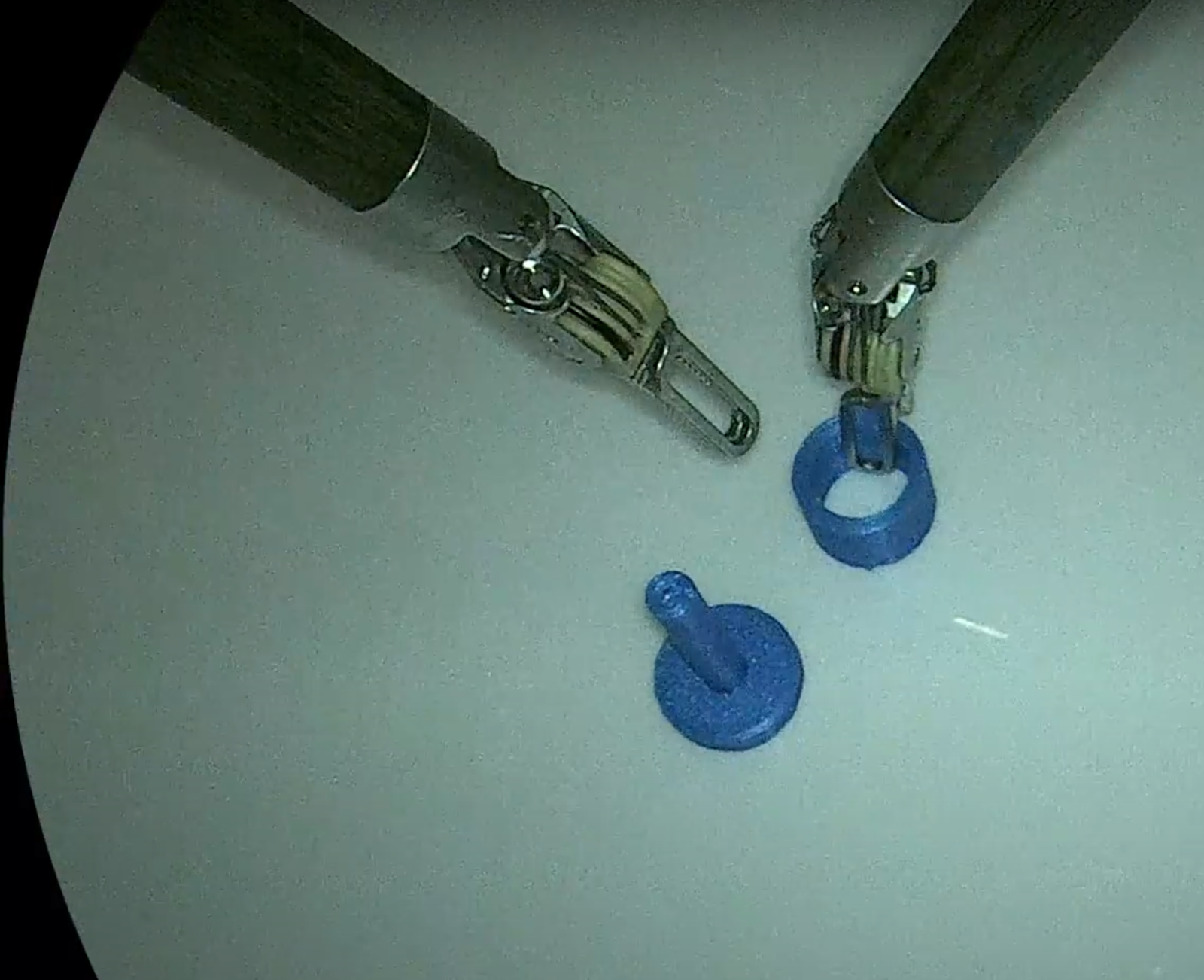
Topic 1: Visuo-Tactile Robot Manipulation for Tight Clearance Assembly.
Click to download Description
In this work, your research topic will be in 6D pose estimation algorithms and contact-rich manipulation. More specifically:
- Evaluating the performance of the some latest 6D pose estimation algorithms in various scenarios;
- Integrating visual perception into our original tactile insertion skill framework and software architecture;
- Verifying your algorithm with real robot experiments;
- Assist the research activities including experiments, and publications;
- Possible to extend internship period to master thesis and aim at publishing papers in top-tier robotics conference.
Contact: Yansong Wu (Yansong.wu@tum.de), Dr. Fan Wu (f.wu@tum.de)
Topic 2: Synthesize Behavior Trees from Human Demonstrations for Industrial Assembly Tasks
Click here to download description
Student projects available (winter semester 2022-23)
Intern + Thesis
Topic 1: Improving sample efficiency of Evolution Strategies in robot learning
Key word: robot learning, reinforcement learning, evolution strategies
Main work-packages:
- Compare and analyse the performance of different existing methods for generating candidate policies in the sampling stage, eg Covariance Matrix Adaptation (CMA) and Gaussian Mixture Model (GMM)
- Evaluate the use of a critic/ discriminator, using classifier eg SVM or other methods, to filter samples
- Establish a benchmarking program for evaluation using robosuite framework.
- (Optional) research and develop novel technique inspired by counterfactual RL to further improve exploration efficiency and convergence speed
Expected distribution of activities:
Research: ⭐⭐⭐⭐⭐
Software development: ⭐⭐⭐
Experiment: ⭐⭐⭐⭐
Difficulty: Hard
Contact: Yansong Wu (Yansong.wu@tum.de), Dr. Fan Wu (f.wu@tum.de)
Topic 2: learning to sequence skills from human demonstration
Key word: learning by demonstration, imitation learning, skill taxonomy
Main work-packages:
- Analyse a given industrial use case and generate a skill analysis report
- Implement existing method for example Hidden Markov Model to learn skill sequences to solve the use case, using kinesthetic teaching.
- Develop new method based on graph model or behaviour tree representation
- (optional) Develop extension to integrate visual observation
Expected distribution of activities:
Research: ⭐⭐⭐⭐⭐
Software development: ⭐⭐⭐⭐
Experiment: ⭐⭐⭐⭐
Difficulty: Hard
Contact: Yansong Wu (Yansong.wu@tum.de), Dr. Fan Wu (f.wu@tum.de)
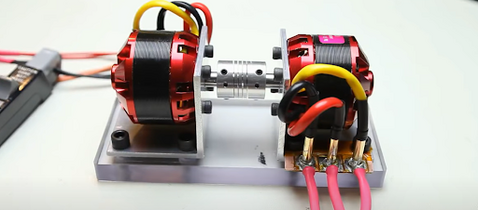
Topic 3: Symbolic representation learning
Key word: physics-informed machine learning, computational physics, learning physics laws
Main work-packages:
- Fabricate a double pendulum with varying inertia and motor configuration based on a given design
- Conduct literature survey on recent relevant research works in learning symbolic system equations
- Conduct physical experiment to compare existing developed method with selected baseline
- (optional) develop more benchmarking examples in simulation
Expected distribution of activities:
Research: ⭐⭐⭐⭐⭐
Software development: ⭐⭐⭐
Experiment: ⭐⭐⭐⭐
Difficulty: Hard
Contact: Fernando Diaz Ledezma (fernando.diaz@tum.de), Dr. Fan Wu (f.wu@tum.de)
Topic 4: Simulation environment development for benchmarking collective robot learning
Key word: robot simulation, collective robot learning.
Possible work-packages:
- Get familiar with our current used collective learning algorithm and the MIOS system (a customized proprietary robot operation system designed for collective learning system).
- Integrate MuJoCo simulation engine and bridge the control interface within the software framework.
- Develop a benchmarking environment for robot collective learning tasks, such as, peg-in-hole insertion, pushing objects or obstacle avoidance, etc.
- (optional) algorithm analysis and comparison.
Expected distribution of activities:
Research: ⭐⭐⭐⭐⭐
Software development: ⭐⭐⭐⭐⭐
Experiment: ⭐⭐⭐⭐⭐
Difficulty: Very Hard
Contact: Samuel Schneider (samuel.schneider@tum.de), Yansong Wu (Yansong.wu@tum.de), Dr. Fan Wu (f.wu@tum.de)
Intern (forschungspraxis)
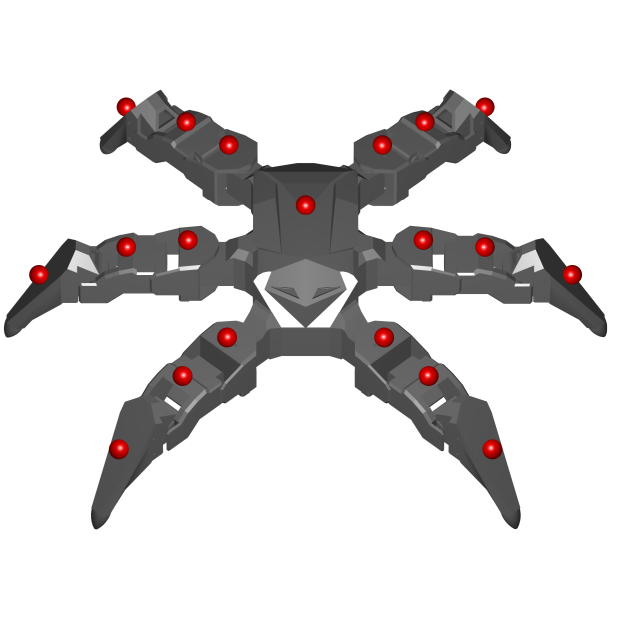
Topic 1: Body exploration based on chaotic oscillators and intrinsic motivation
Key word: machine learning, system identification
Tasks:
- Implement a simulation in Gazebo/Mujoco of the real system
- Survey and implement state-of-the-art model learning algorithms on the simulated system
- Implementation of the selected candidate algorithms of the real planar manipulator for experimental evaluation
Expected outcome: a review of several applicable model learning methods with variable parameters including experimental work on simulated and real systems.
Contact: Fernando Diaz Ledezma (fernando.diaz@tum.de)
Topic 2: integration of force-impedance control with MIOS
Key words: Robot control
Main work-package:
- integrate unifield force-impedance controller to our robot control software stack for collective robot learning system
- provide well-written documentation for the software component developed
- make corresponding example and tutorial
Expected distribution of activities:
Research: ⭐⭐⭐
Software development: ⭐⭐⭐⭐⭐
Experiment: ⭐⭐⭐
Necessary skills:
Contact: Yansong Wu (Yansong.wu@tum.de), Dr. Fan Wu (f.wu@tum.de)
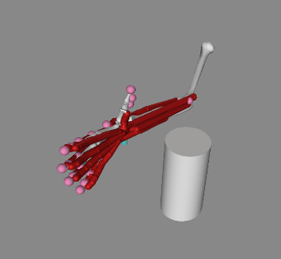
Topic 3: Optimal sequential motion generation for compliant robot throwing tasks
Key words: soft/compliant robots, optimal control, motion primitives
Main work-packages:
- Assist the development and fabrication of robot arm driven by variable stiffness actuators
- Develop novel method for sequential motion generation
Expected distribution of activities:
Research: ⭐⭐⭐⭐⭐
Software development: ⭐⭐⭐
Experiment: ⭐⭐⭐⭐
Contact: Dr. Fan Wu (f.wu@tum.de)
Topic 4: objection detection and robot grasping
Key words: Robot vision, grasping
more details later ...
Topic 5: Tool changing mechanism and/or multifunctional gripper design
Key words: AI Factory, tool changer, multifunctional gripper, mechanical designer,
more details later ...
Topic 6: 3D printing postprocessing robotic automation
Key words: additive manufacturing, robot manipulation, automation
more details later ...