Flexible Communication Networks Lab (FlexComNetsLab)

The FlexComNetsLab is manifested in an end-to-end 5G/6G testbed purely based on open-source sofware and own developed software solutions.
Currently the following features are implemented:
- End-to-End Connection over 4G or 5G Stand Alone (SA) with SDR or commercial devices
- Deterministic controller (Chameleon) over backbone for flow guarantees
- Dynamic RAN Slicing (possible to demonstrate multiple UEs over same/different slices)
- Edge computing for prediction of wireless channel state information
- LiFi / WiFi / 5G handover (under development)
- Flexible Core Network Function placement (under development)
Performance parameters (stable version with OpenAirInterface (OAI):
- FDD: 5/10/20 MHz Bandwidth,
- ~ 8 Mbps UL,
- ~ 35 Mbps DL,
- ~ 10 ms RTT UE - Core
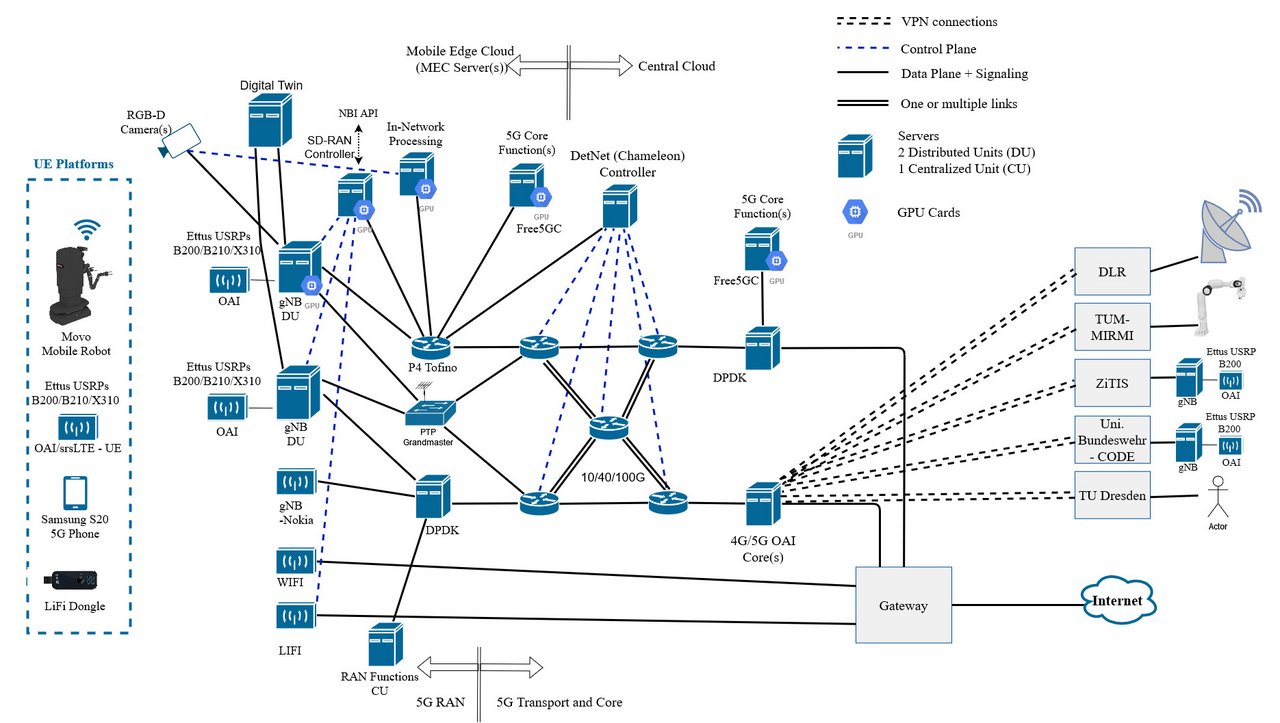
Laboratory setup of the experimental end-to-end 5G/6G communication network
The FlexComNetsLab is based on the 5G Research Hub Munich testbed (https://www.5g-munich.de/), which was a joint project with the chair of media technology (LMT) prof. Steinbach funded by the Bavarian government.
Publications

Serkut Ayvasik, Edwin Babaians, Arled Papa, Yash Deshpande, Alba Jano, Wolfgang Kellerer and Eckehard Steinbach:
Demo: Remote Robot Control with Haptic Feedback over the Munich 5G Research Hub Testbed
WoWMoM 2023, Boston, MA, USA, 2023.
Abstract—Teleoperation of robotic platforms is an emerging area for 5G and beyond 5G communications since reliable bi-directional communication is vital especially to have haptic interaction with the remote environment. This demo presents the teleoperation of a mobile robot with haptic feedback over an end-to-end 5G testbed. The network is deployed only using open-source software projects with Universal Software Radio Peripheral (USRP) software defined radios (SDRs). The human operator will be using a joystick for body movements and a haptic device (3DSystems Touch) for the robot arm while remotely interacting with the mobile robot platform located in Munich.