SNOOKIE
The Snookie project aims at a novel and uniquely bionic approach to the fluid flow perception and control of underwater vehicles. It is inspired by the ability of fish to sense flow fields by means of their flow-sensory system, the lateral-line system. Through this organ fish are able to act in complex environments solely based on information provided via the motion of the surrounding water.
Integration of the artificial lateral-line system with other sensory modalities is to enable the robot to perform such tasks in confined environments and behaviours as observed in fish, such as obstacle detection and geometrical-shape reconstruction by means of hydrodynamic images. Besides this demonstration setup based on the biological source of inspiration, the project looks at the transfer of the developed flow sensing concepts to industrial applications that require sophisticated monitoring of flow conditions.
Snookie is a joint project of the Chair of Theoretical Biophysics T35, Prof. Dr. J. Leo van Hemmen, and the Chair of Information-oriented Control, Prof. Dr.-Ing. Sandra Hirche. The project is supervised by Dr.-Ing. Stefan Sosnowski (ITR) and Dr. Andreas Vollmayr (T35). It started as a students' project at the Institute of Automatic Control Engineering (LSR) in October 2007 with the idea to build a robot capable of diving into corridors of aquiferous caves and exploring channels which are unknown or too narrow and dangerous for humans.
Snookie is featured in the TUM Leonardo da Vinci-center for Bionics.
Bio-inspired Design

Even if completely blind fish are able to locate obstacles or avoid them under poor visual conditions. Studies on the blind cave form of Astyanax mexicanus show that these fish are able to detect and also discriminate objects, if gliding past or towards them at close distance. The example of the blind Mexican cave fish shows that it is obviously possible to make vital decisions such as object avoidance based solely on information mediated by the surrounding fluid motion.
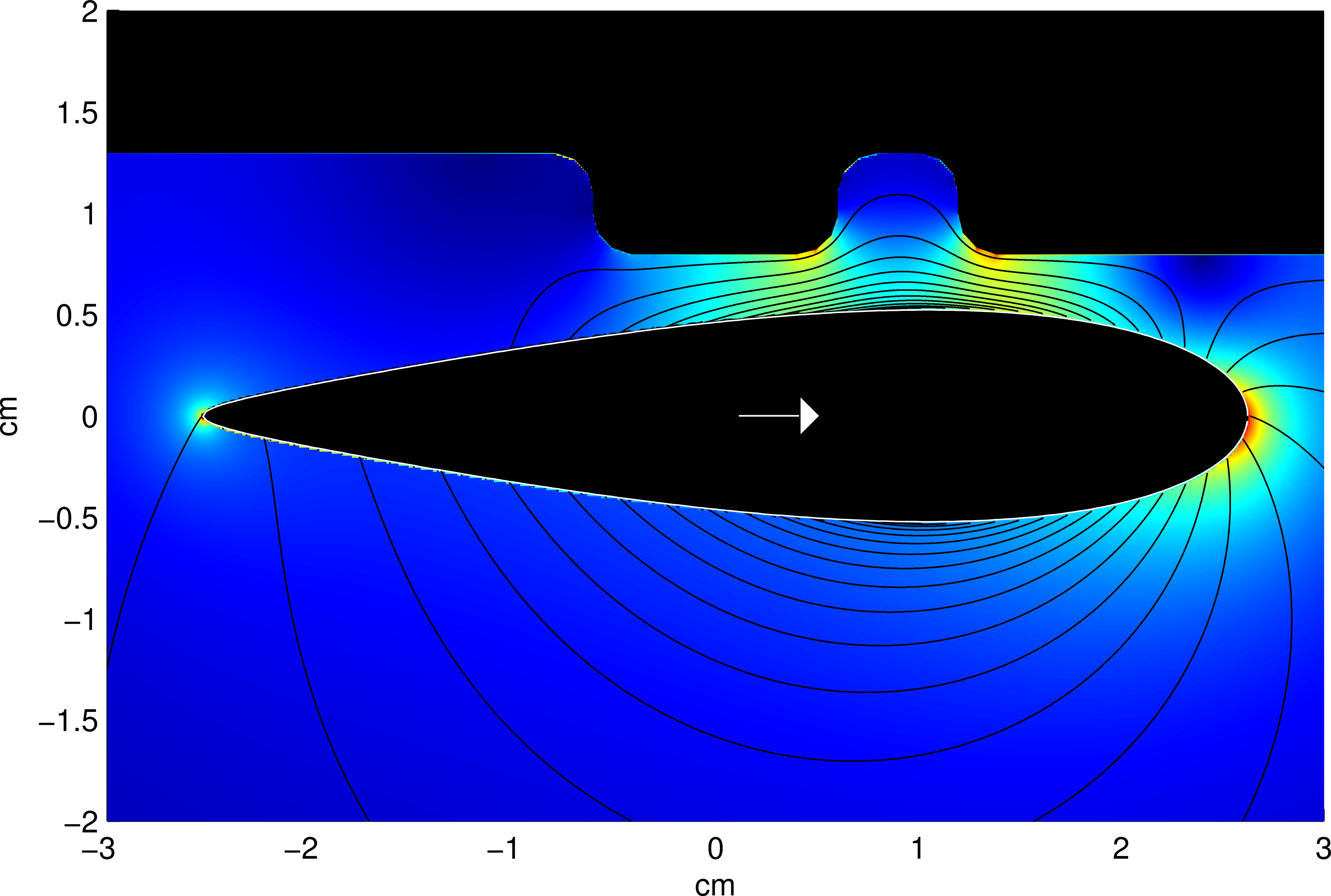
The objects are perceived by means of the lateral-line organ, which is distributed along the body of the fish and responds to the movement of the water relative to the fish's skin. The presence of objects leads to an alteration of the flow field around the fish, which creates a hydrodynamic image of the surroundings on the fish's body.
The robot Snookie
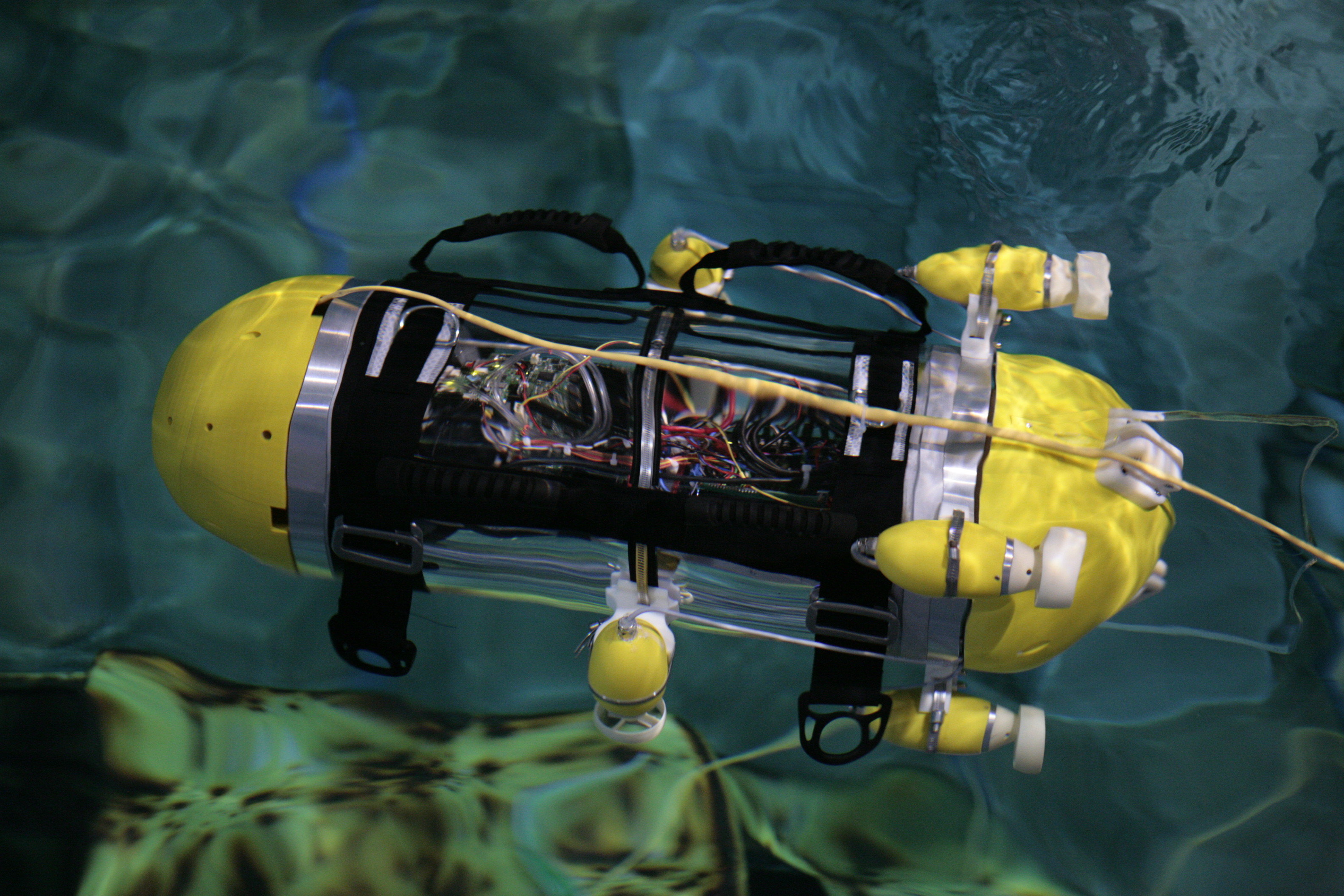

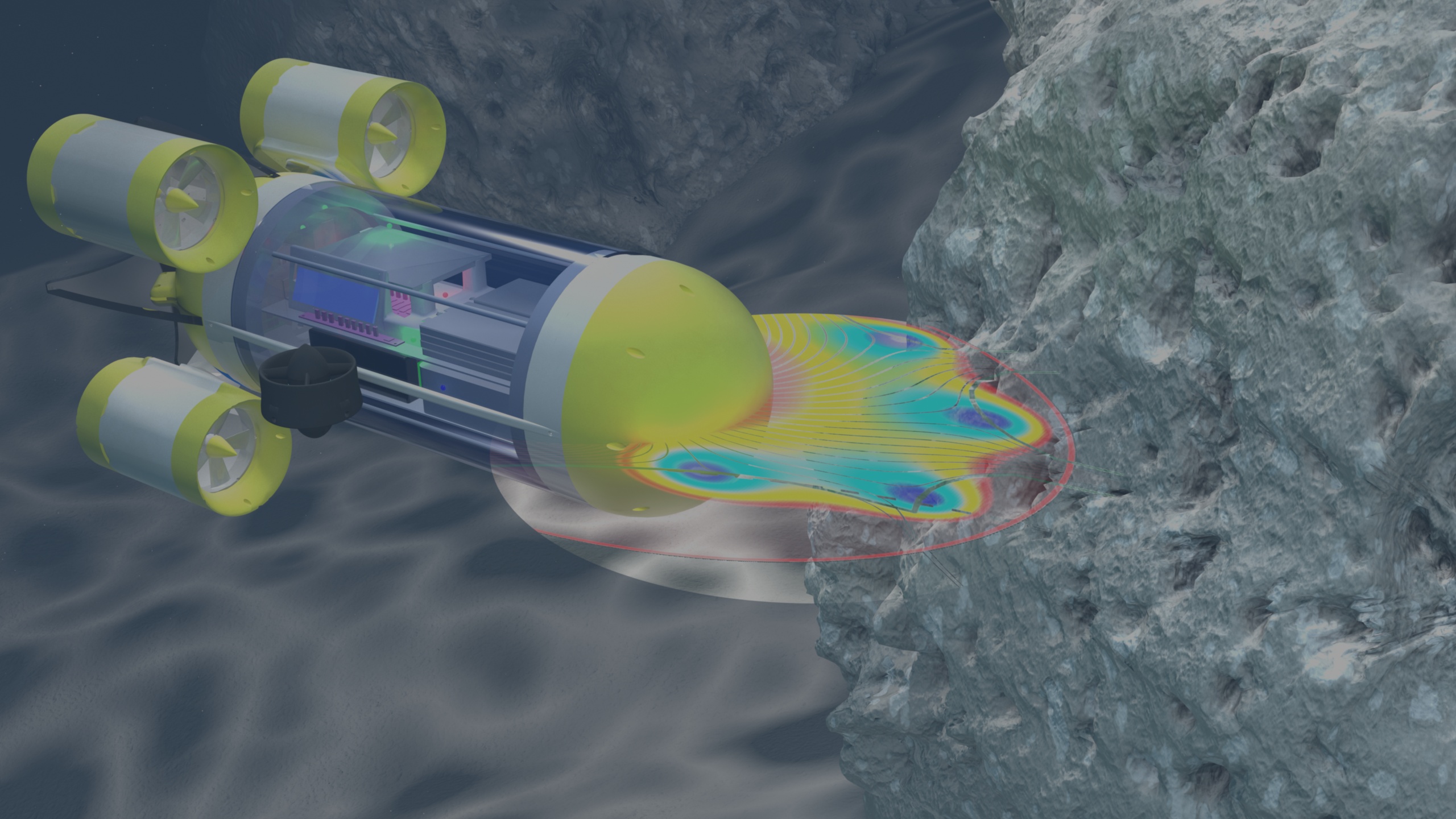
The close range of view of fluid flow perception imposes severe requirements on the dynamics and manoeuvrability of the robot. The autonomous underwater vehicle Snookie provides this functionality and is tailored to the requirements of the artificial lateral-line system. The resulting submarine is approximately 0.75m long and 0.25m in diameter and has good manoeuvring capabilities through the use of a helicopter-like thruster layout with 6 motors. An on-board computer allows to perform navigation tasks, processing of measurement data from the artificial lateral system and decision making, while batteries provide untethered energy.
The artificial lateral-line system
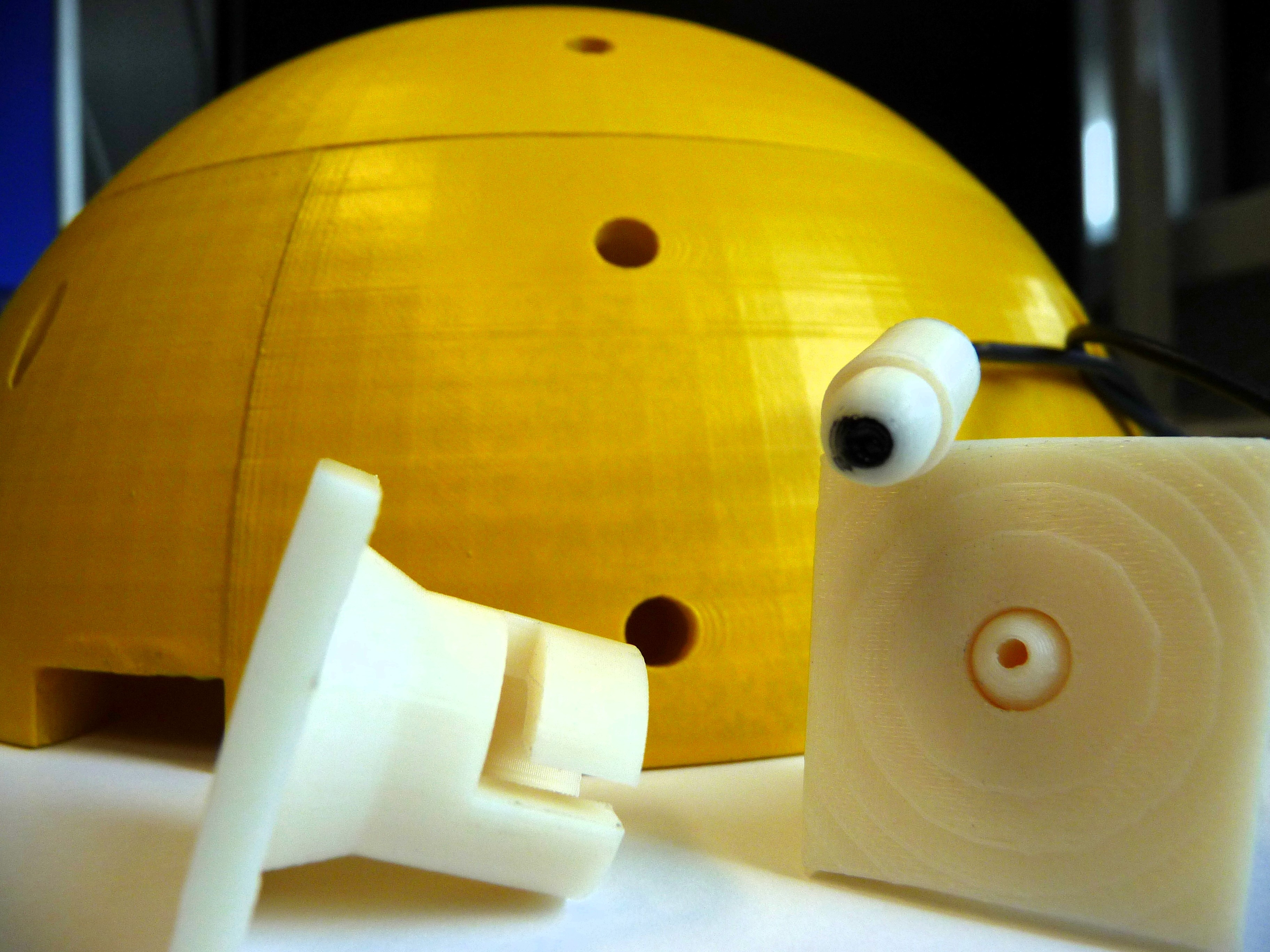
Flow perception is done in this project by means of an artificial lateral-line system, mimicking the functionality but not the physical appearance of the lateral-line sensors of fish.
The artificial lateral-line system (ALL) consists of an array of small heated thermistors integrated in the nozzle. They act as constant temperature velocimeter, driven by an analogue control circuit. Thermal dissipation from the thermistor surface into the fluid is a monotonic function of fluid velocity at the position of the sensor. The fluid velocity is measured via the power consumption of the sensor.
A lateral-line system provides information that is inevitably present on any object immersed in a fluid simply due to the relative motion of objects. It is a passive system in the sense that it uses a signal that is present anyway. It does not depend on visibility conditions such as LIDAR or camera based system. Furthermore, an ALL does not suffer from interference with other active systems or distortions in the vicinity of an complex environments such as a sonar. The interference of the flow field produced by the robot with the environment is the actual signal.
The benefit of an artificial lateral-line system for an underwater robot, which is supposed to carry out a task in the vicinity of other objects, is threefold.
First, an ALL allows the computationally efficient implementation of a collision avoidance.
Second, it allows to determine the relative location, shape, distance and velocity of the boundaries of the fluid (e.g. walls) in a close range, which can be used for exploration, orientation, navigation, or inspection tasks.
And third, it allows to determine the forces of hydrodynamic interaction of the robot with the environment, which occur at close distances. This is important for the dynamics and control of the robot in the vicinity of other objects.
In summary, an ALL is of interest for underwater robots, that are supposed to act in close vicinity to other objects, now matter if moving or stationary.
Fluid flow perception
Fluid flow perception denotes the local measurement and interpretation of physical quantities related to the motion of the fluid.
The physical quantities, i.e. pressure and velocity for an homogeneous incompressible fluid, measured on a subset of the boundaries of the fluid domain, are altered by the shape, position and velocity of the remaining -a priori unknown- boundaries. So, the question arises what information about the motion of the fluid on the domain and the remaining boundary conditions can be obtained from the knowledge of the measurable physical quantities on a known subset of a boundary.
Progress within the Snookie project has been achieved in answering essential questions like:
- What are sufficient and necessary flow conditions to mathematically allow fluid low perception?
- What information about the fluid motion and the environment is present in the tangential velocity of the fluid on the surface of an object (i.e. the hydrodynamic image)?
- What statements can mathematically be made on the motion of the surrounding fluid by measurement of the the hydrodynamic image?
- How to interpret the reconstructed flow field?
- What information can be extracted about the the shape distance and velocity of boundaries?
- How to construct an computationally efficient collision avoidance heuristic?
- How to determine the forces of hydrodynamic interaction?
- How to design an artificial lateral line system of suitable geometry and precision to carry out the tasks mentioned?
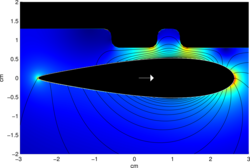
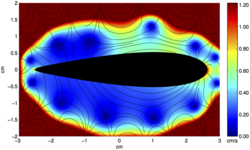
In a nutshell, the measurement of the tangential velocities though the artificial lateral-line system together with the no-penetration condition (i.e. no flow can penetrate the hull), provides the robot with Cauchy boundary conditions on the surface covered by the ALL. Provided Prandtl's boundary layer approximation holds around the ALL, regions of quasi-potential flow around the ALL can be expected. Cauchy boundary conditions, on a subset of the boundary (here the ALL), are sufficient to in principle uniquely define the flow field.
But, as many inverse problems, the reconstruction of the flow field from its values on the ALL is ill-posed. By suitable regularisation a sufficient -albeit small- range of view around the ALL is obtained.
Project gallery
Snookie during a test run Artificial lateral-line system 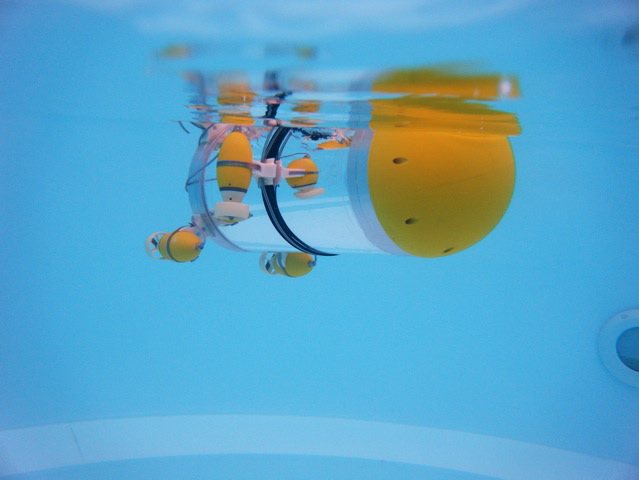
Early test run 
The AUV Snookie (© by Kurt Fuchs)
- Slide 1(Aktuelles Element)
- Slide 2
- Slide 3
- Slide 4
Publications
A.N. Vollmayr, S. Sosnowski, S. Hirche, J.L. van Hemmen, "Snookie: an Autonomous Underwater Vehicle with Artificial Lateral Line System – 20," Bleckmann, Horst;Mogdans, Joachim;Coombs, Sheryl L. (Hrsg.): in Flow Sensing in Air and Water, Springer Berlin Heidelberg(VIII. Aufl.), 2014, 521-562 [PDF] [BibTeX] [mediaTUM]
S. Sosnowski, J.-M. P. Franosch, L. Zhang, Y. Nie, S. Hirche, J. L. van Hemmen, "Simulation of the Underwater Vehicle “Snookie”: Navigating like a Fish," in Proceedings of the 1st International Conference on Applied Bionics and Biomechanics (ICABB 2010) , 2010 [PDF] [BibTeX] [mediaTUM]
J.-M.P. Franosch, S. Sosnowski, N. Kuhenuri Chami, K. Kühnlenz, S. Hirche, J. L. van Hemmen, "Biomimetic Lateral-Line System for Underwater Vehicles," in Abstracts of the 9th IEEE SENSORS CONFERENCE, 2010 [PDF] [BibTeX] [mediaTUM]
People involved in the Snookie Project
| Principal Investigators | Affiliation |
|---|---|
| Sandra Hirche | ITR |
| J. Leo van Hemmen | T35 |
| Team | Affiliation | Role |
|---|---|---|
| Stefan Sosnowski | ITR Staff | Project supervision |
| Andreas Vollmayr | T35 Staff | Project supervision |
| Former team members |
|---|
| Moritz J. Franosch |
| Johannes Dorfner |
| Magda Dorfner |
| Leonard Janczyk |
| Jochen Kursawe |
| Marko Kertes |
| Nora Martiny |
| Philipp Mittendorfer |
| Yimin Nie |
| Benedikt Schröfel |
| Jean-Philippe Sobczak |
| Paul Zeller |
| Licong Zhang |
| Pawel Ziemianin |
| Nader Kuhenuri Chami |
| Florian Helmhold |
| Martin Thoma |
| David Lenz |
| Sebastian Urban |
| Daniel Llano Jiminez |
| Gowtham Kumar Tangirala |
| Marco Karmann |
| Alireza Eskandari |