Collaborative Construction Robots (CoCoRo)

Automating manual processes on construction sites
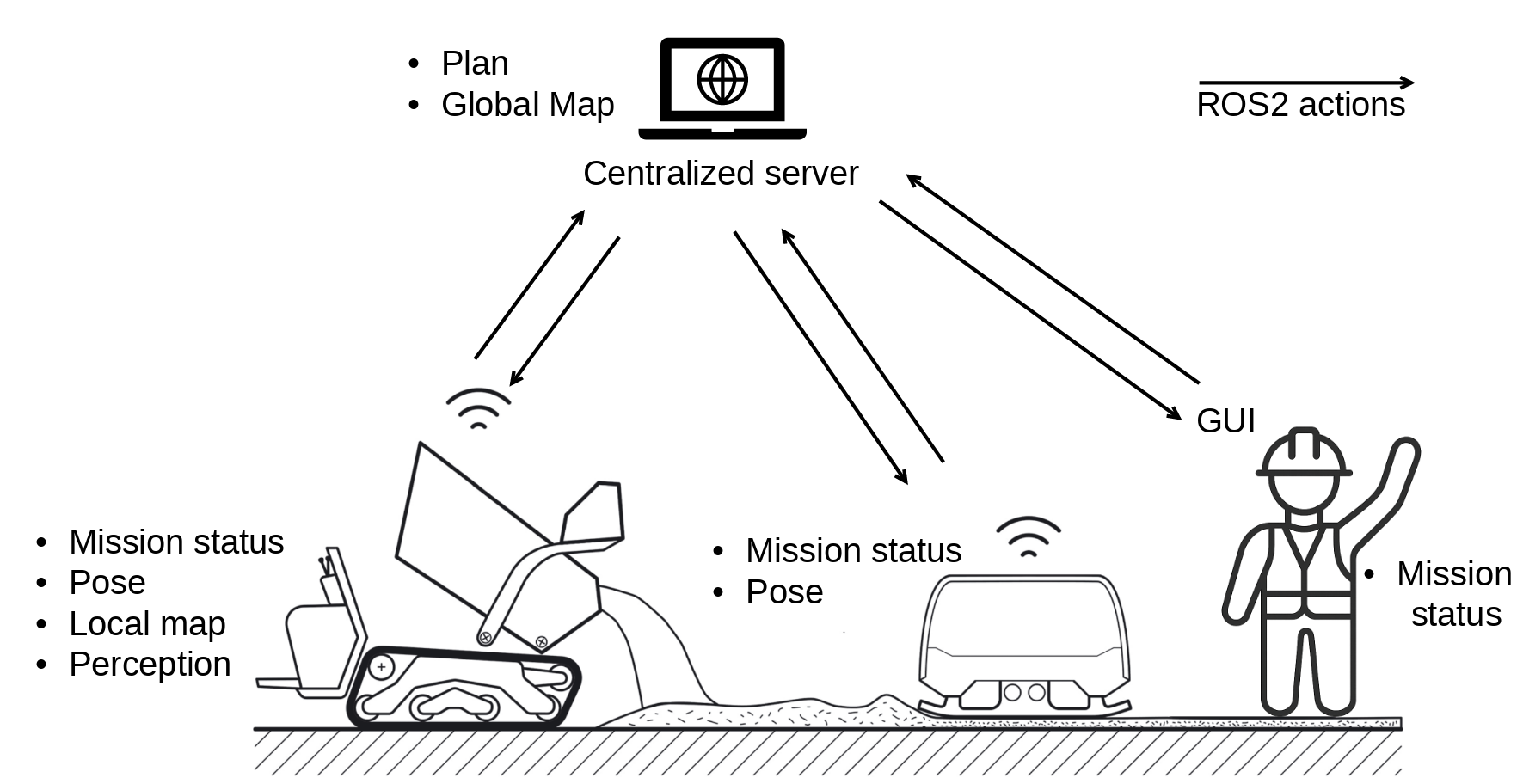
The construction industry faces significant challenges, including a persistent shortage of skilled labor, rising costs, and limited digitization. While automation has transformed industrial production, the unstructured and dynamic nature of construction sites makes full automation difficult to implement. Instead of aiming for complete autonomy, this project explores the transition towards semi-autonomous construction, where human operators and autonomous robots collaborate to improve efficiency and safety. Specifically a use case will be developed in which an autonomous dumper, a vibration plate and a mobile server work together to transport and compact bulk material.
Project Partner
Chair of Materials Handling, Material Flow, Logistics
Funding
TUM Georg Nemetschek Institute Artificial Intelligence for the Build World
Contact Person