Teleoperation over 5G communication networks
| Funding Agency: | DFG |
| Duration: | 3 years, 01.03.2018 - 28.02.2021 |
| Partners: | Dalian University of Technology, China |
| Contact Persons: | Xiao Xu |
Scope of the project
Audiovisual communications is at the core of multimedia systems that allow users to interact across distances. While audiovisual information provides a user with a satisfactory impression of being present in a remote environment, physical interaction and manipulation are not supported. True immersion into a distant environment requires the ability to physically interact with remote objects and to literally get in touch with other people. Touching and manipulating objects remotely becomes possible if we augment traditional audiovisual communications by the haptic modality. Haptic communications is a relatively young field of research that has the potential to revolutionize human-human and humanmachine interaction.
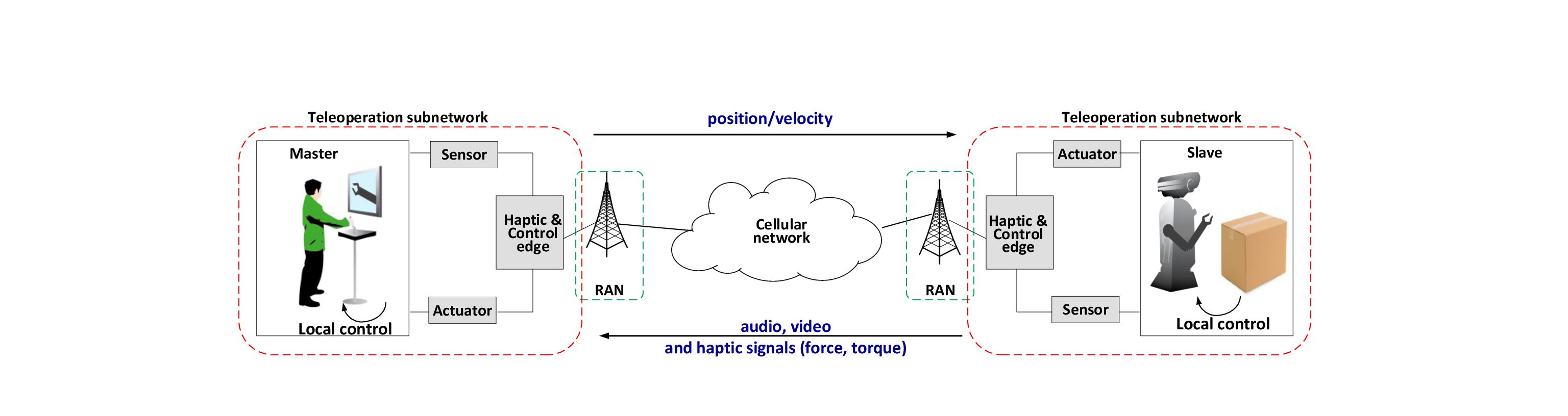
Recently, 5G mobile networks have gained considerable research attention, including the idea of a control-oriented communication solution (also called the Tactile Internet). The targeted low latency communication, high level of coverage and reliability and improved throughput make 5G networks very suitable for teleoperation applications with haptic feedback.
In this project, we investigate teleoperation with haptic feedback over 5G networks in two directions (1) Top-down: focusing on application (APP) layer mechanisms while considering network characteristics; (2) Bottom-up: focusing on medium access (MAC) layer resource allocation while considering the application characteristics.
From the application perspective, the teleoperation performance is highly affected by the adopted haptic communication schemes and the QoS provided by the underlying 5G communication network. So far, however, there is neither a common understanding about the preferred haptic communication approaches under different QoS conditions, nor generalizable results about the required QoS to achieve a certain teleoperation quality. To this end, the following objectives are planned for the first step:
- Identify objective performance metrics for teleoperation systems.
- Design novel haptic communication schemes by combining haptic data reduction algorithms with stability-ensuring control approaches
- Enable perceptually transparent and stable switching between different haptic communication modes in this project.
From a network perspective, one major difference between haptic teleoperation and traditional multimedia communication is the bidirectional exchange of haptic information between the user and the teleoperator. Because of the bidirectional nature, stability and transparency of teleoperation are strongly affected by the communication latency and reliability. Therefore, we propose to achieve the following goals in the second step:
- Derive the required QoS for a desired teleoperation performance as the fourth objective.
- Optimize the allocation of the radio resources for networked bilateral teleoperation applications running different haptic communication schemes.
In addition to the communication of haptic information, video and audio signals are also transmitted under a strict synchronicity requirement. Thus another objective of this project is to design a prioritized multi-modality data delivery MAC architecture aiming at ensuring the rate and latency constraints of all types of traffic, even during handover.
The final objective of this project is to use the developed APP- and MAC-layer schemes, and perform joint optimization of haptic communication and 5G radio resource allocation.