PostDoc

Xiao Xu, Dr.-Ing.
Lehrstuhl für Medientechnik (Prof. Steinbach)
Postadresse
Postal:
Arcisstr. 21
80333 München
- Tel.: +49 (89) 289 - 23512
- Raum: 0509.02.914
- xiao.xu(at)tum.de
Biography
Xiao Xu received the B.Sc. degree in information engineering from Shanghai Jiao Tong University, China, in 2008, and the M.Sc. degree in information engineering from the Technical University of Munich (TUM), Germany, in 2011. After this, he joined the Chair of Media Technology, TUM, in April 2011, where he worked as a member of the Research Staff. His research interests were in the field of perceptual coding of haptic data streams with stability ensuring control architectures and the model-mediated telemanipulation. He received the Ph.D. degree in June 2017. From December 2017 he joined the Altran Technologies, SA (Germany) as an advanced consultant, where he worked as a group leader for the pre-development of autonomous-driving technologies. From March 2018 he joined the Chair of Media Technology, TUM, where he is working as a senior researcher with the research interests of haptic codecs and haptic communications.
Research Interests
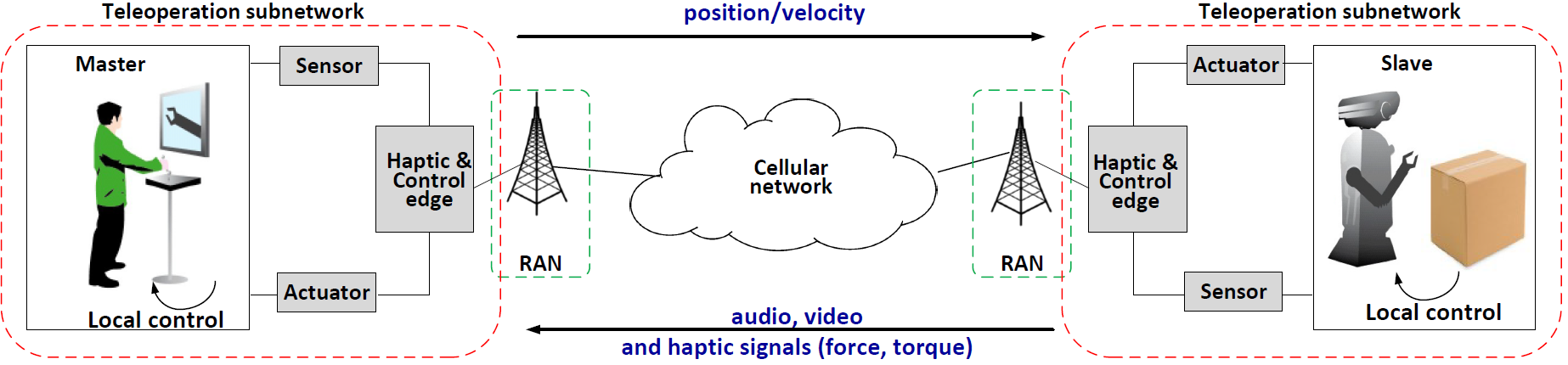
A typical bilateral haptic teleoperation system consists of three main parts: the human operator (OP)/master system, the teleoperator (TOP)/slave system, and the communication link/network between them. The TOP is typically controlled by the position or velocity commands generated by the OP and returns to the haptic and visual signals sensed during its interaction with the remote environment back to the OP. The commands and the visual-haptic data are exchanged over a communication network, as visualized in Fig. 1. At the operator side the haptic and visual feedback signals are displayed to the user, which allows the user to haptically and visually immerse into the remote environment.
For teleoperation in remote environments, the communication of haptic information imposes strong demands on a communication network.
First, system stability requires a high sampling rate of 1 kHz or even higher. Teleoperation systems, hence, transmit 1000 or more haptic data packets per second bidirectionally over the network. The resulting high packet load on the network leads to substantial data overhead due to the transmission of packet header information. Therefore, it is desirable to develop approaches that reduce the amount of haptic packets to be exchanged between the master and slave.
On the other hand, to guarantee the stability of the global control loop in the presence of communication delay, several control schemes have been developed. In their original form, however, these schemes are difficult to use in real-world implementations as they ignore the high packet rates of haptic information over packet-switched networks.
For real teleoperation systems, the haptic data reduction approaches and the stability-ensuring control schemes need to be jointly considered to realize a stable system design and an efficient data communication. The control and haptic data reduction approaches introduce different types of artifacts/distortions into the system, their performance varies between tasks, and they also differ in their robustness towards different network parameters. The artifacts introduced by the control schemes can aggravate the distortion introduced by the data reduction approach, and vice versa. One of the major questions relates to the extent to which the packet rate can be reduced such that the system still preserves stability and high teleoperation quality in the presence of communication delay.
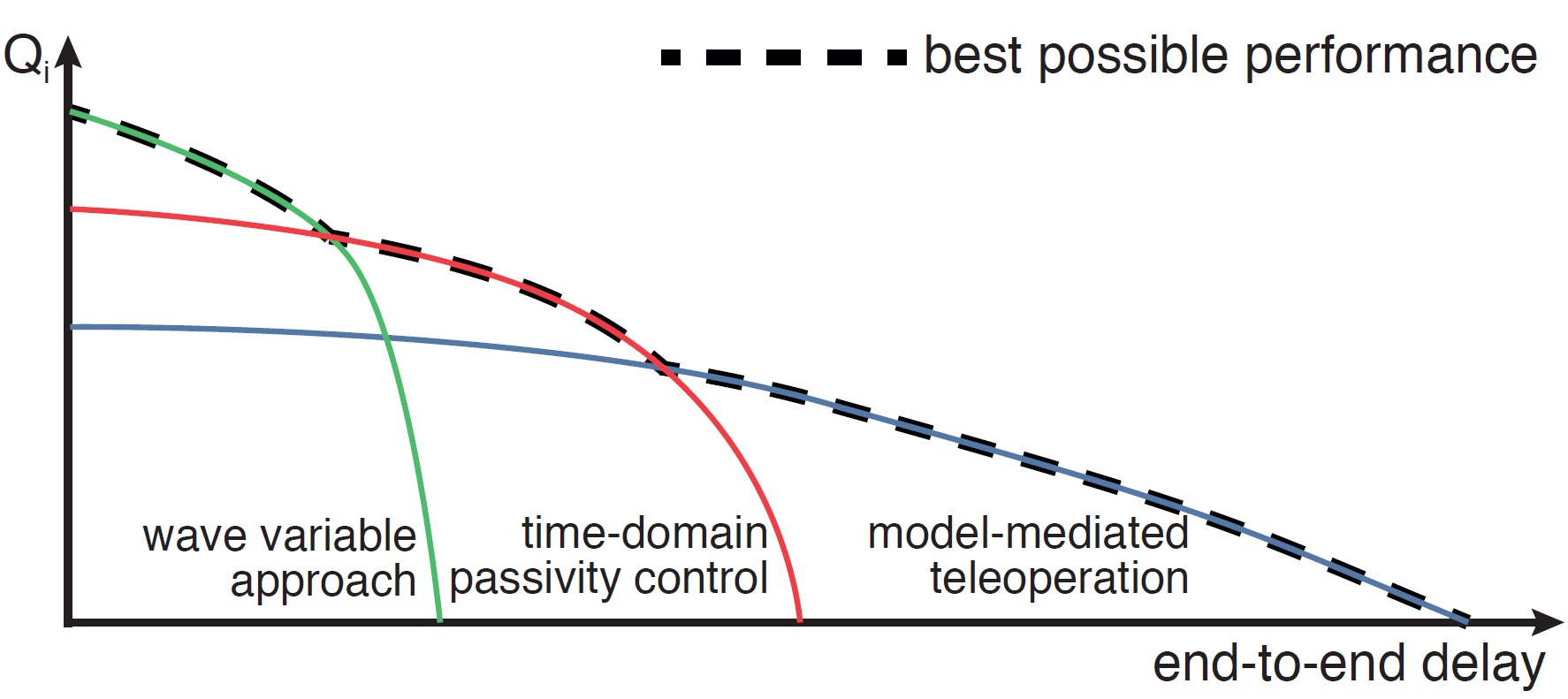
Thus, the implementation of teleoperation systems using realistic communication networks requires a more holistic view. Communication and control need to be optimized jointly to achieve the best possible trade-off between system performance and QoS requirements. In other words, the teleoperation system needs to adaptively switch between different control and communication schemes according to the current QoS parameters so that system performance is always guaranteed at the highest possible level.
Figure 2 illustrates a hypothetical performance measure for different control schemes as a function of the end-to-end delay.