eCar

Experimental Platform for Innovative Electric Car Architectures
Currently great efforts are taken to move from ordinary cars with combustion engine towards fully electric cars with eCorners. In industry this way leads over cars with hybrid engines. Thereby a lot of the restrictions of combustion engines are inherited and the electric engine is only used to replace the ordinary engine. So this approach can not benefit from the new features of electric engines. On the other side all the mechanical safety mechanisms are working as before to ensure necessary functionality in situations of system blackouts.
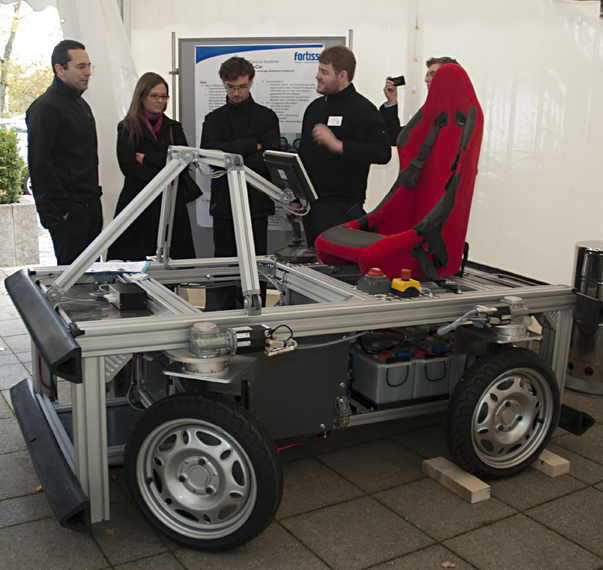
Within the eCar project, an experimental platform is built to demonstrate the new possibilities with respect to the state of the art in computer science. The goal is to develop an innovative architecture for electric cars fully steered by x-by-wire. Further project goals are centralization of control functions to minimize the number of ECUs, an innovative system for redundancy management, and an unification of used bus protocols.
Key Data:
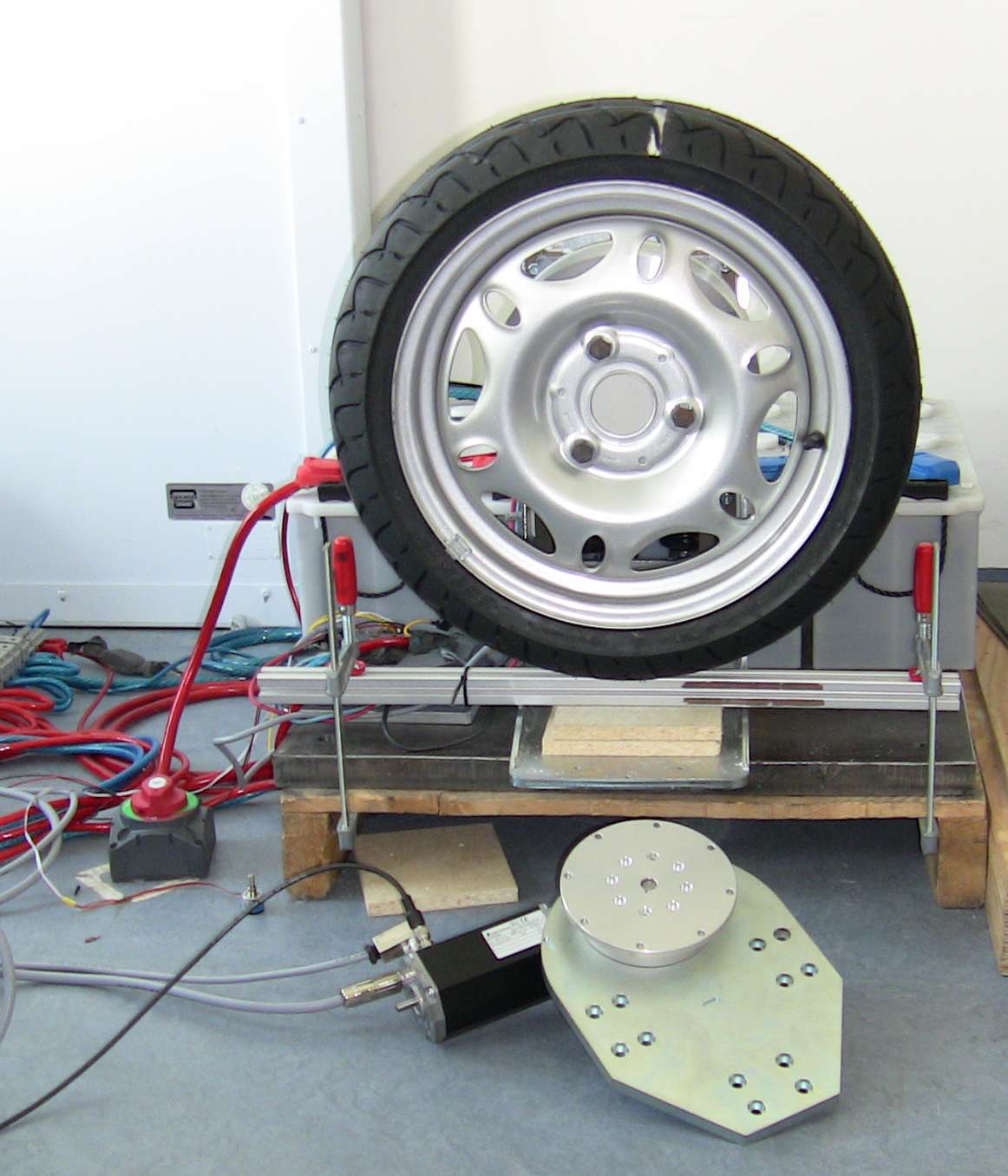
- 4 independent eCorner modules
- 2 kW drive power
- 520 rpm nominal rotary speed
- 160 Nm max. torque
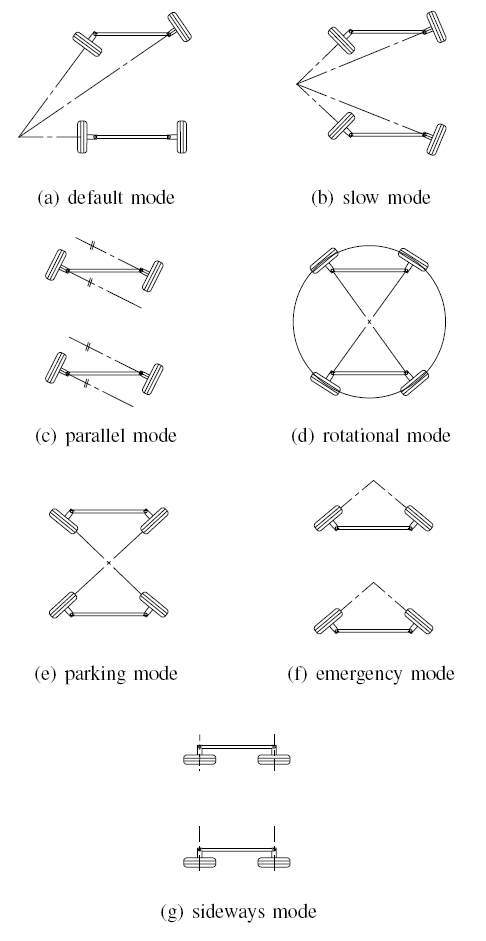
- independently steerable
- ca. 50 kg weight
- Controllers
- 1 computer for driver input and display of information (Linux-PC)
- 1 central controller (Luminary Micro LM3S8962 Board)
- 2 controllers one placed on each axis (Luminary Micro LM3S8962 Board)
- Communication
- Between central controller and axis controllers a real-time Ethernet protocol based on IEEE 1588 is used, which supports time- and event-triggered communication
- Axis controllers and eCorner-modules are connected via CAN bus (CANopen)
- Input / Output
- Side stick
- 10inch touch screen
- 4 truck batteries
- 4 x 12 V DC with 140 Ah capacity
- 48 V DC drive motors
- 24 V DC steering motors
- 12 V DC HMI computer and touch screen
- 5 V DC Luminary boards and hub
- overall dimensions: 2.2m x 1.3m x 1.7m (LxWxH)
- 600 kg total weight
- 200 kg payload
- 54 km/h max. speed
- 1 passenger
Pictures







Videos
eCar at SPS/IPC/DRIVES Exhibition (November 2010)
Demonstration of Different eCar Drive Modes (November 2010)
eCar at Embedded World Exhibition (March 2010)
eCar Drive (March 2010)
First eCar Testdrive in a Garage (October 2009)
People
- Dipl.-Ing. Martin Eder
- Dipl.-Inf. Gerd Kainz
- Dipl.-Inf. Alexander Camek
- Michael Schmitt
- Dr. Christian Buckl
Partners
- http://www.fortiss.org, fortiss GmbH
Publications
[1] Martin Eder and Alois Knoll. Design of an experimental platform for an x-by-wire car with four-wheel steering. In Proceedings of the 6th IEEE Conference on Automation Science and Engineering, pages 656-661. IEEE Press, 2010. [ DOI | .bib | .pdf ]
[2] Gerd Kainz, Christian Buckl and Alois Knoll: Experimental Platform for Innovative ICT Car Architecture (white-paper .pdf)