WEARHAP - Wearable Haptics for Humans and Robots
The complexity of the world around us is creating a demand for cognition-enabled interfaces that will simplify and enhance the way we interact with the environment. Project WEARHAP aims at laying the scientific and technological foundations for wearable haptics, a novel concept for the systematic exploration of haptics in advanced cognitive systems and robotics that will redefine the way humans will cooperate with robots. The challenge of this new paradigm stems from the need for wearability which is a key element for natural interaction. Wearable haptics will enable robots to observe humans during natural interaction with their shared environment. Research challenges are ambitious and cross traditional boundaries between robotics, cognitive science and neuroscience. Research findings derived from distributed robotics, biomechanical modeling, multisensory tracking, underaction in control and cognitive systems will be integrated to address the scientific and technological challenges imposed in creating effective wearable haptic interaction. To highlight the enabling nature, the versatility and the potential for industrial exploitation of WEARHAP, the research challenges will be guided by representative application scenarios. These applications cover robotics, health and social scenarios, stretching from human-robot interaction and cooperation for search and rescue, to human-human communication, and interaction with virtual worlds through interactive games.
Structure
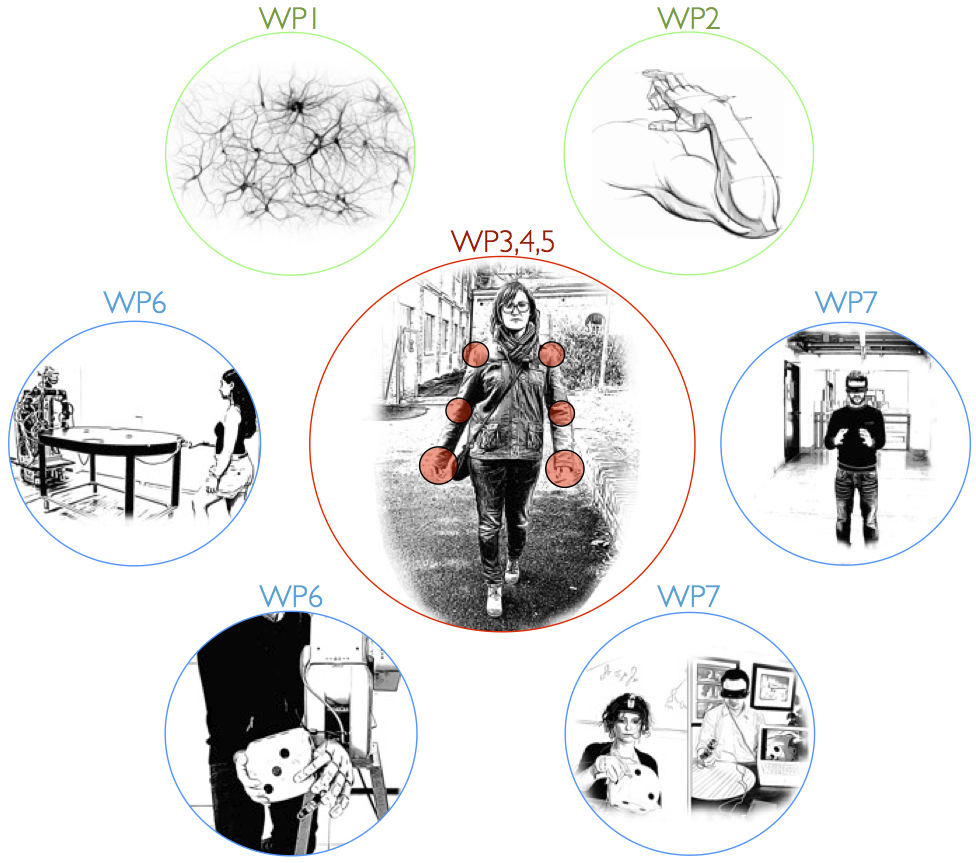
The whole project structure is composed of seven Workpackages (WP) which are grouped in three layers.
The first layer includes the neuroscience and computational models of the touch, that are necessary in the design of the haptic devices along with tracking and control algorithms:
- WP1 Neuroscience and physiology: foundations for wearable haptic systems
- WP2 Computational models of human touch
The second layer deals with the development of the integrated wearable haptic system consisting of the distributed multi-DoF and underactuated system, sensing and cognitive control:
- WP3 Multisensory tracking and sensing
- WP4 Wearable and distributed multi-DoF haptic systems
- WP5 Cognitive control of wearable haptic systems
Finally, in the third layer the main representative scenarios are developed:
- WP6 Wearable haptics for human robot interaction and cooperation
- WP7 Wearable haptics for social and healthcare scenarios
TUM Contribution
The main contribution of the TUM group will be:
- Integration and low level control for distributed haptic systems
- Human haptic intention recognition and prediction
- An architecture for cognitive adjustable team control
- Cooperative object exploration with WEARHAP-equipped humans
- Cognitive adjustable team control of robots and WEARHAP users
- Experimental setup for integrated WEARHAP system in human-robot interaction
Large scale integrating project (IP)
Project title: WEARHAP-WEARable HAPtics for Humans and Robots
Project number: 601165
Call (part) identifier: FP7-ICT-2011-9
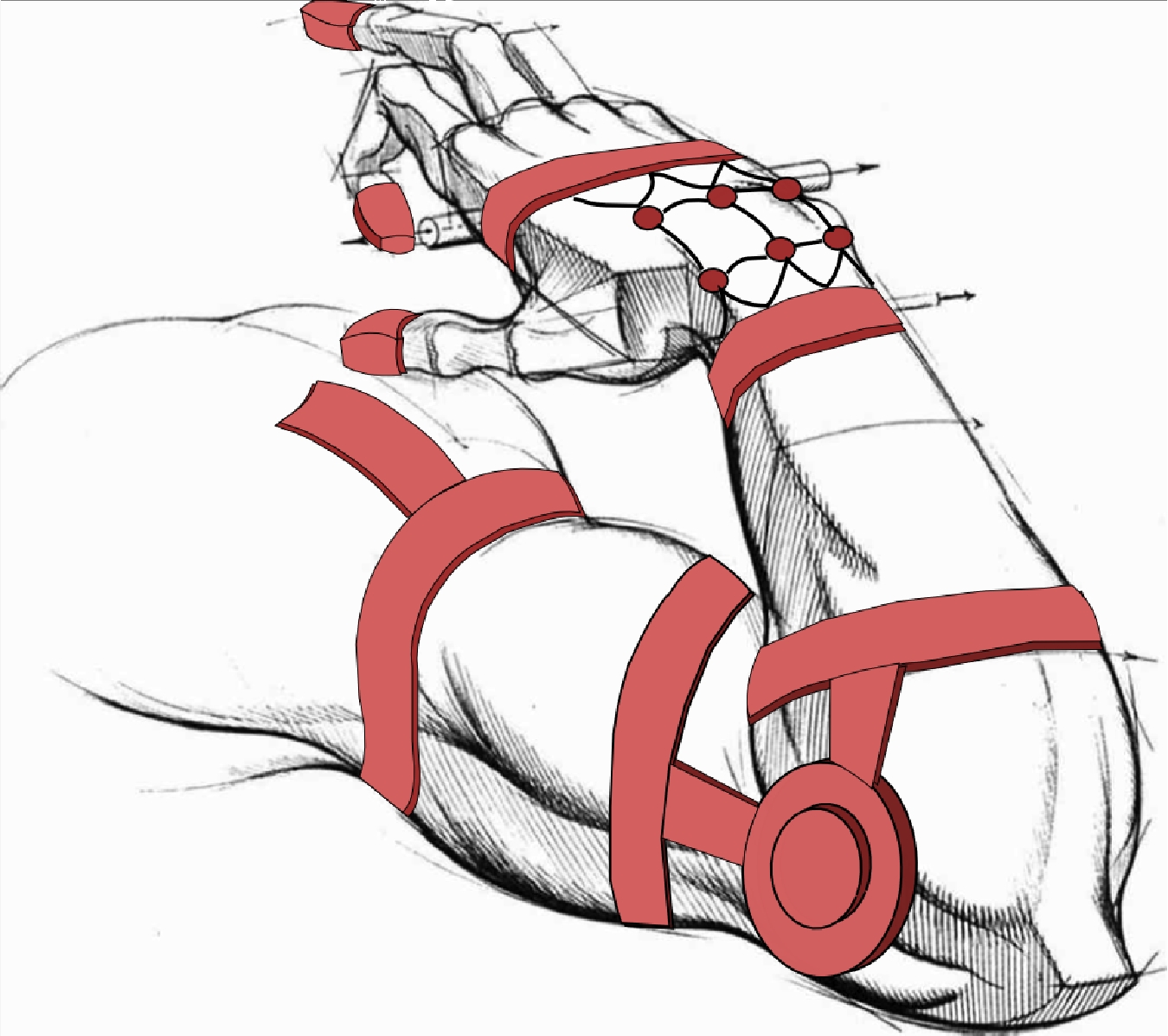
The wearable haptic system is a robotic system worn by the human, intrinsically distributed and multi degree-of-freedom, but necessarily largely underactuated and undersensed, to improve the wearability factor. The system applies stimuli to the human body to allow communication, interaction and cooperation with the environment augmented with other robots, other humans, digital contents and virtual reality. Although the methodologies developed in this project are general enough not to limit the analysis to a particular part of the human body, this project will focus on both human arms and hands with their shoulder and elbow joints and wrists.
The Consortium is composed by:
- Università degli Studi di Siena (UNISI, Italy)
- Universität Bielefeld (UNIBI, Germany)
- Technische Universität München (TUM, Germany)
- Università di Pisa (UNIPI, Italy)
- Scuola Superiore di studi universitari e di perfezionamento Sant’Anna (SSSA, Italy)
- Foundation for Research and Technology Hellas (FORTH, Greece)
- Universidad Rey Juan Carlos (URJC, Spain)
- Fondazione Istituto Italiano di Tecnologia (IIT, Italy)
- Université Pierre et Marie Curie (UPMC, France)
- Umeå Universitet (UMU, Sweden)
The WEARHAP project will last for 4 years.