- Prediction with Gaussian Process Dynamical Models. IEEE Transactions on Automatic Control (submitted), 2020 more… BibTeX
- Estimation of Involuntary Components of Human Arm Impedance in Multi-Joint Movements via Feedback Jerk Isolation. Frontiers in Neuroscience 14, 2020, 459 more… BibTeX
- Visual Pursuit Control with Target Motion Learning via Gaussian Process. Proceedings of the Conference of the Society of Instrument and Control Engineers of Japan, 2020 more… BibTeX
- Posterior Variance Analysis of Gaussian Processes with Application to Average Learning Curves. arXiv preprint: arXiv:1906.01404, 2019 more… BibTeX
- Shared invariance control for constraint satisfaction in multi-robot systems. The International Journal of Robotics Research 38 (10-11), 2019, 1268-1285 more… BibTeX
- Stable Gaussian Process based Tracking Control of Euler-Lagrange Systems. Automatica (103), 2019, 390-397 more… BibTeX
- Inverse Optimal Control for Multiphase Cost Functions. IEEE Transactions on Robotics 35 (6), 2019, 1387-1398 more… BibTeX
- The Effect of Skill Level Matching in Dyadic Interaction on Learning of a Tracing Task. 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), 2019 more… BibTeX
- Impedance-based Gaussian Processes for Modeling Human Motor Behavior in Physical and Non-physical Interaction. IEEE Transactions on Biomedical Engineering 66 (9), 2019, 2499-2511 more… BibTeX
- Backstepping for Partially Unknown Nonlinear Systems Using Gaussian Processes. IEEE Control Systems Letters 3 (2), 2019, 416 - 421 more… BibTeX
- A Multi-layer Gaussian Process for Motor Symptom Estimation in People with Parkinson’s Disease. IEEE Transactions on Biomedical Engineering 66 (11), 2019, 3038-3049 more… BibTeX
- Human-guided multi-robot cooperative manipulation. IEEE Transactions on Control Systems Technology 27 (4), 2019, 1492 - 1509 more… BibTeX
- Local Asymptotic Stability Analysis and Region of Attraction Estimation with Gaussian Processes. Proceedings of the 58th Conference on Decision and Control (CDC) , 2019 more… BibTeX
- Keep soft robots soft - a data-driven based trade-off between feed-forward and feedback control. Workshop on Robust autonomy: tools for safety in real-world uncertain environments (RSS 2019), 2019 more… BibTeX
- Closed-loop Model Selection for Kernel-based Models Using Bayesian Optimization. Proceedings of the 58th Conference on Decision and Control (CDC), 2019 more… BibTeX
- An Uncertainty-Based Control Lyapunov Approach for Control-Affine Systems Modeled by Gaussian Process. IEEE Control Systems Letters 2 (3), 2018, 483-488 more… BibTeX
- Considering Uncertainty in Optimal Robot Control Through High-Order Cost Statistics. IEEE Transactions on Robotics (99), 2018, 1-14 more… BibTeX
- Physically Plausible Wrench Decomposition for Multieffector Object Manipulation. Transaction on Robotics (34(4)), 2018, 1053-1067 more… BibTeX
- Estimation of Involuntary Impedance in Multi-joint Arm Movements. IFAC Conference on Cyber-Physical & Human Systems (CPHS), 2018 more… BibTeX
- Dynamics-based estimation of Parkinson's disease severity using Gaussian Processes. Second IFAC Conference on Cyber-Physical & Human Systems, 2018 more… BibTeX
- Passive noninteracting control for human-robot team interaction. 57th IEEE Conference on Decision and Control (CDC), 2018 more… BibTeX
- Uncertainty-based Human Motion Tracking with Stable Gaussian Process State Space Models. IFAC Conference on Cyber-Physical & Human Systems (CPHS), 2018 more… BibTeX
- A Scenario-based Optimal Control Approach for Gaussian Process State Space Models. Proceedings of the European Control Conference (ECC), 2018 more… BibTeX
- An embodiment paradigm in evaluation of human-in-the-loop control. IFAC Conference on Cyber-Physical & Human Systems (CPHS), 2018 more… BibTeX
- Mean Square Prediction Error of Misspecified Gaussian Process Models. Proceedings of the 57th Conference on Decision and Control (CDC), 2018 more… BibTeX
- Gaussian Process based Passivation of a Class of Nonlinear Systems with Unknown Dynamics. 2018 European Control Conference (ECC), IEEE, 2018 more… BibTeX
- Regelung für sichere Mensch- Roboter-Interaktion. 2017 more… BibTeX
- Acquisition, Validation and Preprocessing of Wrist-Worn Sensor Data in Patients with Parkinson’s Disease and Healthy Controls. International Parkinson and Movement Disorder Society 201721st International Congress, Vancouver, BC more… BibTeX
- Considering Human Behavior Uncertainty and Disagreements in Human–Robot Cooperative Manipulation. In: Trends in Control and Decision-Making for Human–Robot Collaboration Systems. Springer, 2017 more… BibTeX
- Gaussian Process for 6-DoF Rigid Motions. Autonomous Robots, 2017 more… BibTeX
- Computationally Efficient Rigid-body Gaussian Process for Motion Dynamics. IEEE Robotics and Automation Letters (RA-L), 2017, 1601 - 1608 more… BibTeX
- Invariance Control for Safe Human-Robot Interaction in Dynamic Environments. IEEE Transactions on Robotics (6), 2017, 1327-1342 more… BibTeX
- Dynamically Consistent Online Adaptation of Fast Motions for Robotic Manipulators. IEEE Transactions on Robotics (T-RO) 34 (1), 2017, 166-182 more… BibTeX
- Stable Model-based Control with Gaussian Process Regression for Robot Manipulators. Proceedings of the 20th IFAC World Congress, 2017 more… BibTeX
- Feedback Linearization using Gaussian Processes. Proceedings of the Conference on Decision and Control (CDC), IEEE, 2017 more… BibTeX
- Bayesian Uncertainty Modeling for Programming by Demonstration. International Conference on Robotics and Automation (ICRA), IEEE, 2017 more… BibTeX
- Learning Stable Gaussian Process State Space Models. American Control Conference (ACC), IEEE, 2017 more… BibTeX
- Data augmentation of wearable sensor data for parkinson's disease monitoring using convolutional neural networks. Proceedings of the 19th ACM International Conference on Multimodal Interaction - ICMI 2017, 2017 more… BibTeX
- Stable Gaussian Process based Tracking Control of Lagrangian Systems. Proceedings of the 56th Conference on Decision and Control (CDC), 2017 more… BibTeX
- Learning Stable Stochastic Nonlinear Dynamical Systems. International Conference on Machine Learning (ICML), 2017 more… BibTeX
- Robotic Billiards: Understanding Humans in Order to Counter Them. Transactions on Cybernatics 2016 8 (46), 2016, 1889 - 1899 more… BibTeX
- Impedance-based Gaussian Processes for Predicting Human Behavior during Physical Interaction. International Conference on Robotics and Automation 2016, 2016 more… BibTeX
- An extremum-seeking control approach for constrained robotic motion tasks. Control Engineering Practice (52), 2016, 1-14 more… BibTeX
- Gaussian Processes for Dynamic Movement Primitives with Application in Knowledge-based Cooperation. International Conference on Intelligent Robots and Systems (IROS), 2016 more… BibTeX
- Augmented Invariance Control for Systems with Smoothness Constraints. Proceedings of the 55th Conference on Decision and Control (CDC), 2016 more… BibTeX
- Invariance Control with Time-varying Constraints. Proceedings of the European Control Conference (ECC), 2016, 867--872 more… BibTeX
- Equilibrium distributions and stability analysis of Gaussian Process State Space Models. Proceedings of the 55th Conference on Decision and Control (CDC), 2016 more… BibTeX
- Stability of Gaussian Process State Space Models. Proceedings of the European Control Conference (ECC), 2016 more… BibTeX
- Constrained Robot Control Using Control Barrier Functions. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, 279--285 more… BibTeX
- Synchrony and Reciprocity: Key Mechanisms for Social Companion. Int. Journal of Social Robotics, 2015 more… BibTeX
- Synthesizing Anticipatory Haptic Assistance Considering Human Behavior Uncertainty. IEEE Transactions on Robotics 31 (1), 2015, 180 - 190 more… BibTeX
- Gaussian Process Dynamical Models over Dual Quaternions. European Control Conference (ECC), 2015 more… BibTeX
- Active Safety Control for Dynamic Human-Robot Interaction. Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015, 4685--4691 more… BibTeX
- Effects of Vibrotactile Feedback on Human Control Performance in a Dynamical Stabilization Task. IEEE World Haptics Conference (WHC), 2015, 415-420 more… BibTeX
- Uncertainty-dependent Optimal Control for Robot Control Considering High-order Cost Statistics. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2015 more… BibTeX
- Object Handover Prediction using Gaussian Processes clustered with Trajectory Classification. arXiv preprint: arXiv:1707.02745, 2014 more… BibTeX
- Rhythm Patterns Interaction - Synchronization Behavior for Human-Robot Joint Action. PlosOne 9 (4), 2014, e95195 more… BibTeX
- Dyadic movement synchronization while performing incongruent trajectories requires mutual adaptation. Frontiers in Human Neuroscience 461 (8), 2014 more… BibTeX
- Workspace Analysis for a Kinematically Coupled Torso of a Torque Controlled Humanoid Robot. IEEE International Conference on Robotics & Automation (ICRA), 2014, 3439-3445 more… BibTeX
CON-HUMO - Control based on Human Models

CON-HUMO focuses on novel concepts for automatic control, based on data-driven human models and machine learning. This enables innovative control applications that are difficult if not impossible to realize using traditional control and identification methods, in particular in the challenging area of smart human-machine interaction. In order to achieve intuitive and efficient goal-oriented interaction, anticipation is a key. For control selection based on prediction, a dynamic model of the human interaction behavior is required, which, however, is difficult to obtain from first principles.
In order to cope with the high complexity of human behavior with unknown inputs and only sparsely available training data, we propose to use machine-learning techniques for statistical modeling of the dynamics. In this new field of human interaction modeling – data-driven and machine-learned – control methods with guaranteed properties do not exist. CON-HUMO addresses this niche. Key methodological innovation and breakthrough is the merger of probabilistic learning with model-based control concepts through model confidence and prediction uncertainty.
The ambitious goals of CON-HUMO are structured in three research blocks:
- The design of Bayesian system identification for human interaction behavior.
- The analysis of control properties of learned Bayesian dynamical systems.
- The synthesis of constrained control based on learned Bayesian dynamical systems.
Bayesian non-parametric models of human interaction behavior
Classical system identification methods approach the characterization of dynamics by assuming a parametric model which is adapted depending on observed data. In contrast, Bayesian non-parametric models are a suitable alternative for the identification of non-linear dynamical systems. Instead of computing optimal parameters, for instance Gaussian process(GPs) based models only define the correlation between observations and predictions naturally result by applying Bayesian inference. They are also compelling due to their ability to provide prediction confidence bounds. Additionally, incorporating available knowledge gives GP priors a structure in accordance with the real function to approximate. In this research area we aim for studying Bayesian models that incorporate a priori properties of human behavior, from well-known sensorimotor structures to desirable control properties.
Control properties of learned Bayesian dynamical systems
Over the last decade the use of Bayesian models such as Gaussian Processes (GPs) has grown significantly in the control community. Due to several advantages of GPs like the small number of parameters and the data smoothing behavior, it is an easy-to-use technique for the interpolation of nonlinear functions. This approach has been proven beneficial for model-based control algorithms, e.g. Model Reference Adaptive Control (MRAC) or Model Predictive Control (MPC). However, the analysis of the closed-loop dynamics requires a closer look to the inherent properties of GP-based dynamical systems. Although widely applied for control, the current characterization of their control-related properties is very limited. Here, we aim for a systematic specification of control-relevant characteristics like stability, controllability and observability of GPs. These results are instrumental for the design of robust controllers based on GP-based Dynamical Systems.
Constrained control design based on Bayesian dynamical systems
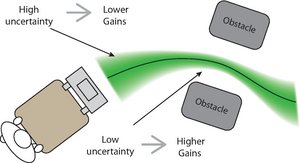
The deployment of automated systems based on Bayesian dynamical models poses novel challenges in control design. When Bayesian priors are involved, control strategies relying only on expected dynamics/constraints are likely to perform poorly as they neglect valuable information encoded in model uncertainty. Besides expected values, Bayesian dynamical models also provide confidence levels reflecting potential variations. This level of uncertainty is an a priori indicator of potential prediction errors and should form a decisive factor for control. To account for this valuable additional measure, we explore systematic control approaches that account for variability while maintaining the desired control-related properties such as stability and constraint satisfaction.