- A Decoupling Scheme for Force Control in Cooperative Multi-Robot Manipulation Tasks. IEEE 17th International Conference on Advanced Motion Control, 2022 more… BibTeX
- Distributed Bayesian Online Learning for Cooperative Manipulation. 2021 60th IEEE Conference on Decision and Control (CDC), IEEE, 2021 more… BibTeX
- Fully distributed cooperation for networked uncertain mobile manipulators. IEEE Transactions on Robotics 36 (4), 2020, 984-1003 more… BibTeX
- Opinion Behavior Analysis in Social Networks under the Influence of Coopetitive Media. IEEE Transactions on Network Science and Engineering 7 (3), 2020 more… BibTeX
- Distributed Control for Cooperative Manipulation with Event-Triggered Communication. IEEE Transaction on Robotics 36 (4), 2020, 1038-1052 more… BibTeX
- Event-Triggered Consensus for Euler-Lagrange Systems with Communication Delay. 21th IFAC World Congress, 2020 more… BibTeX
- Finite-Time Distributed Topology Design for Optimal Network Resilience. IET CONTROL THEORY AND APPLICATIONS, 2019 more… BibTeX
- Human-Robot Team Interaction Through Wearable Haptics for Cooperative Manipulation. IEEE Transactions on Haptics, 2019 more… BibTeX
- Polarizability, Consensusability and Neutralizability of Opinion Dynamics on Coopetitive Networks. IEEE Transactions on Automatic Control 64 (8), 2019, 3339 - 3346 more… BibTeX
- Human-Robot Interaction Through Fingertip Haptic Devices for Cooperative Manipulation Tasks. 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), 2019 more… BibTeX
- Event-Triggered Consensus of Multi-Agent Systems on Strongly Connected Graphs. 2018 IEEE Conference on Decision and Control (CDC), IEEE, 2018 more… BibTeX
- Distributed Topology Manipulation to Control Epidemic Spreading over Networks. IEEE Transactions on Signal Processing 67 (5), 2018, 1163-1174 more… BibTeX
- Event- Triggered Consensus of Multi-Agent Systems on Strongly Connected Graphs. , 2018 more… BibTeX
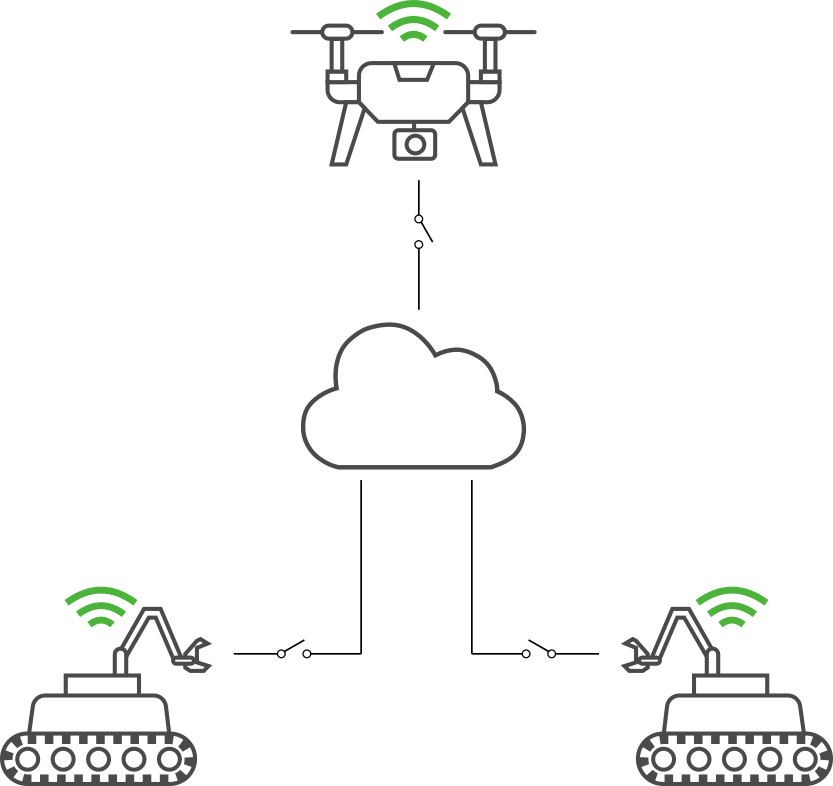
COVEMAS - Control and Optimization for Event-triggered Networked Autonomous Multi-agent Systems
Many tasks for modern robotic systems require the coordination of multiple interacting agents. Typical applications include - amongst others - search and rescue, surveillance coverage and environmental monitoring. The joint Sino-German research project COVEMAS, founded from DFG and NSFC, aims at reducing the energy cost of such cooperating multi-agent systems. Firstly, using the concept of event-triggered control, energy consumption in sensing and actuation can be drastically reduced. Secondly, the project studies the energy cost of the algorithms implemented to achieve the cooperative task and optimal controllers regarding this cost are designed.
Advanced topics in networked systems using event-based control
Typically distributed coordination algorithms for multi-agent systems assume continuous-time agent dynamics, sensing and actuation. While this holds true for the plant dynamics, the majorities of agents have digital microprocessors which take sensor measurements at certain discrete time instances and process them to update the control inputs. This inherently discrete process is commonly approximated by a time-continuous one by assuming significantly higher sensing and actuation updating frequencies, compared to the time constants of the agent and network dynamics. However, this requirement of a high sampling rate can lead to an inefficient usage of (limited) energy resources and high actuator wear. In order to reduce the amount of sensing and actuation, this project investigates event-based control for cooperating multi-agent systems. In event-based control updating the state measurement and/or the control input occurs only at certain discrete time instance, determined by a trigger function. Especially considering highly nonlinear plant dynamics, such as the Euler-Lagrange equations of motion which can be used to model a variety of agents, the reduced information available to the controller, as well as the piecewise continuous control law, can reduce the convergence speed of the system or in the worst case lead to instability. Thus the key challenge is the design of triggering functions which maintain the stability of the closed-loop system and achieve coordination between the agents.