Ehemaliger wissenschaftlicher Mitarbeiter
Über mich

Alexander Tödtheide erlangte im Juli 2023 den Doktor der Ingenieurwissenschaften (Dr.-Ing.) in Elektrotechnik an der Technischen Universität München mit "summa cum laude" und im März 2015 seinen Dipl.-Ing. in Maschinenbau an der Leibniz Universität Hannover.
Während seiner wissenschaftlichen Karriere arbeitete er in der Forschungsgruppe Simulation, Systemoptimierung und Robotik an der Technischen Universität Darmstadt (Deutschland) unter der Leitung von Professor Oskar von Stryk von März 2015 bis August 2015 und anschließend am Institut für Regelungstechnik (IRT) an der Leibniz Universität Hannover unter Professor Sami Haddadin von September 2015 bis März 2018. Er setzte seine Arbeit mit Professor Sami Haddadin am Munich Institute of Robotics and Machine Intelligence (MIRMI) an der Technischen Universität München (TUM) von April 2018 bis Dezember 2022 fort. Derzeit ist er als Head of Mechatronics bei der Danobat Switzerland AG im Bereich Präzisions-Robotik tätig.
Während seiner Forschungsjahre nahm er 2015 an der DARPA Robotics Challenge als Teil des Teams ViGIR teil, wo er mit seiner Forschung zur Robotermodellidentifikation des Boston Dynamics ATLAS-Roboters beitrug. Er trug auch zum Projekt SoftPro Horizon 2020 bei, indem er Robotersysteme und -regler, wie z.B. künstliche nachgiebige pneumatische Roboter, taktile Oberarmprothesen und Exoskelette, entwickelte. Diese Arbeiten werden nun in der Geriatronik-Forschung am MIRMI und in klinischen Studien im Projekt A.ID weitergeführt. Gemeinsam mit seinem Kollegen Dr.-Ing. Johannes Kühn war er Mitbegründer des ersten MIRMI-Cybathon-Teams "Cybertum" und Kurses im Masterstudiengang, bei dem er ein Studententeam bei der Entwicklung einer fortschrittlichen Oberarmprothese von Grund auf bis zum Finale des Cybathlon-Wettbewerbs 2020 in Zürich (Schweiz) betreute.
Seine Doktorarbeit "Unified Force-Sensitive Robot Mechatronics" befasst sich mit einem Entwicklungsansatz für taktile robotische Systeme, der die Modellierung, das Design und die Regelung eines taktilen Roboters in einem ganzheitlichen Rahmen kombiniert. Das Framework wird erfolgreich anhand von drei verschiedenen robotischen Systemen validiert, die auf unterschiedlichen Aktorik-, Sensor- und Übertragungskonzepten basierend, entworfen, implementiert und experimentell getestet werden. Die Arbeit liefert neue Erkenntnisse über das Design und die Regelung spezialisierter taktiler Robotersysteme und vereinfacht zukünftige Entwicklungen. Die Arbeit wurde mit der höchsten Auszeichnung von Professor Sami Haddadin von der Technischen Universität München (TUM), Professor Tamim Asfour vom Karlsruher Institut für Technologie (KIT) und Professor Robert Riener von der Eidgenössisch Technischen Hochschule Zürich (ETHZ) bewertet.

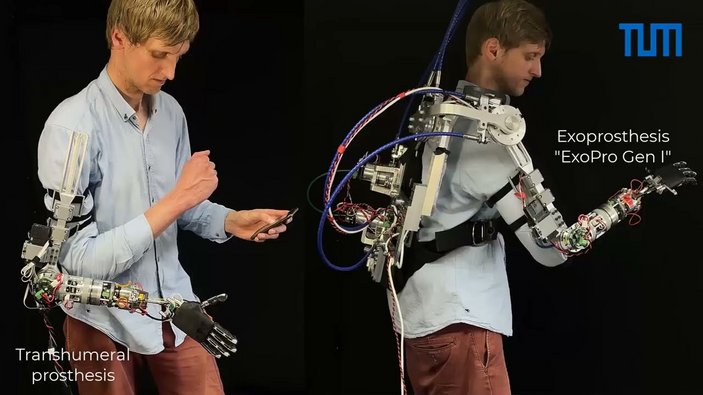
Im Rahmen seiner Promotion veröffentlichte Dr.-Ing. Alexander Tödtheide seine Forschung in sieben Erstautorveröffentlichungen in peer-reviewten und hoch angesehenen internationalen Konferenzen und Zeitschriften wie RA-L, ICRA, Humanoids, T-RO und IJRR. Besonders bemerkenswert ist seine Forschung an einer Oberarmprothese, die das Verhalten des menschlichen neuromuskulären Systems in Bezug auf Körper- und Kontaktbewusstsein, Nachgiebigkeit und Freiheitsgrade reproduziert (IJRR 2023), sowie die Exoprothese, die den ersten tragbaren und aktiv gesteuerten Prothesenschaft darstellt, um schädliche Interaktionskräfte für den Prothesenträger zu reduzieren und das Tragen von Prothesen angenehmer zu gestalten (T-RO 2023). Mehr Informationen zu diesen Veröffentlichungen finden Sie in der neuesten Pressemitteilung von MIRMI.
Social Media
Youtube Videos
Mehr Informationen

Mehr Informationen
Mehr Informationen
Mehr Informationen
Publikationen
A. Tödtheide, E. Pozo Fortunić, J. Kühn, E. Jensen, and S. Haddadin, “A Transhumeral Prosthesis with an Artificial Neuromuscular System: Sim2Real-Guided Design, Modeling and Control”, International Journal of Robotics Research (IJRR), 2023, (accepted).
A. Tödtheide, E. Pozo Fortunić, J. Kühn, E. Jensen, and S. Haddadin, “A Wearable Force-Sensitive and Body-Aware Exoprosthesis for a Transhumeral Prosthesis Socket”, IEEE Transactions on Robotics (T-RO), 2023.
A. Tödtheide and S. Haddadin, “CPA-Wrist: Compliant Pneumatic Actuation for Antagonistic Tendon Driven Wrists”, IEEE Robotics and Automation Letters (RA-L), 2018.
A. Tödtheide, T. Lilge, and S. Haddadin, “Antagonistic Impedance Control for Pneumatically Actuated Robot Joints”, IEEE Robotics and Automation Letters (RA-L), 2016.
N. Seppich, N. Tacca, K. Chao, M. Akim, D. Hidalgo-Carvajal, E. Fortunić, A. Tödtheide, J. Kühn and S. Haddadin, “CyberLimb: A Novel Robotic Prosthesis Concept with Shared and Intuitive Control”, Journal of NeuroEngineering and Rehabilitation (JNER), 2022.
J. Kühn, T. Hu, A. Tödtheide, E. Pozo Fortunić, E. Jensen, and S. Haddadin “Seamless Limb-Driven Prostheses: The Synergy-Complement Control Approach”, Nature Machine Intelligence, 2022, (under review).
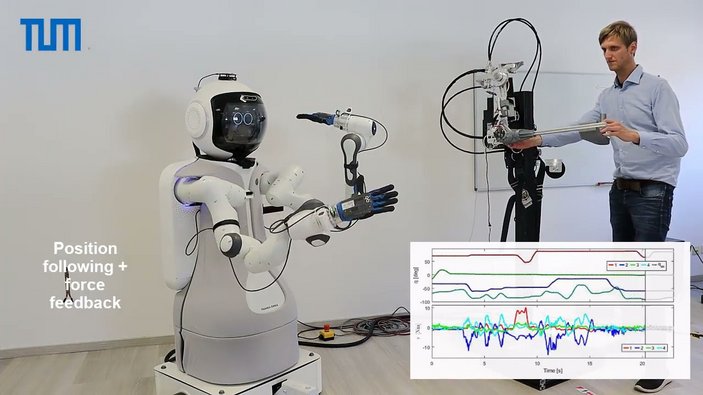
A. Tödtheide, X. Chen, H. Sadeghian, A. Naceri and S. Haddadin, “A Tactile Exoskeleton for Tele-operation: An Application in Elderly Care Robotics”, IEEE Conference on Robotics and Automation (ICRA), 2023, London, United Kingdom.
A. Tödtheide, J. Kühn, E. Pozo Fortunić and S. Haddadin, “An Integrated, Force-Sensitive, Impedance Controlled, Tendon-Driven Wrist: Design, Modeling, and Control”, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2015, Munich, Germany.
A. Tödtheide, E. Shahriari and S. Haddadin, “Tank Based Unified Torque/Impedance Control for a Pneumatically Actuated Antagonistic Robot Joint”, IEEE Conference on Robotics and Automation (ICRA), 2017, Singapore, Singapore.
J. Vorndamme, M. Schappler, A. Tödtheide and S. Haddadin, “Soft robotics for the hydraulic atlas arms: Joint Impedance Control with Collision Detection and Disturbance Compensation”, IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2016, Daejeon, Korea.
M. Schappler, J. Vorndamme, A. Tödtheide, D. Conner, O. von Stryk and S. Haddadin, “Modeling, Identification and Joint Impedance Control of the Atlas Arms”, IEEE-RAS International Conference on Humanoid Robots (Humanoids), 2015, Nancy, France.