Bionic Hands Design
Andreas Heddergott/TUM 
Picture from Piazza et al, TNSRE 2020 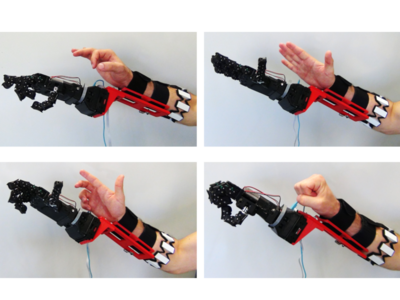
Picture from Rossi et al, ICORR 2017 
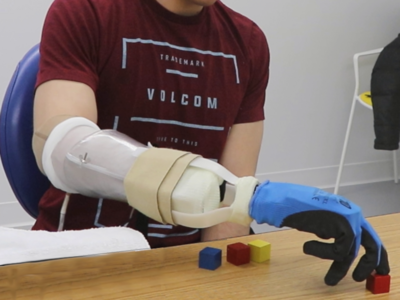
SoftHand Pro (Team Unipi-IIT) @ Cybathlon Series 2019 
SoftHand Pro (Team Unipi-IIT) @ Cybathlon Series 2019 
Picture from Piazza et al, JNER 2020 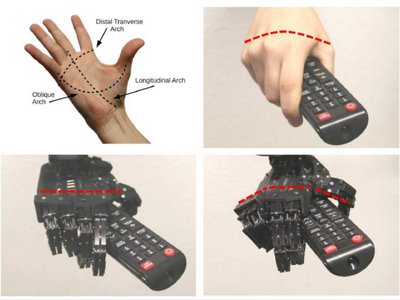
Picture from Capsi-Morales et al, RA-L 2020 
Picture from Piazza et al, RAM 2017
- Slide 1(Aktuelles Element)
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
Technological advancements have led to the development of dexterous bionic hands and sensory-motor interfaces that try to replicate the extraordinary functionalities of biological limbs thanks to the combination of multiple actuators, sensors and advanced myoelectric control algorithms. However, in the last few decades, many robotics research groups have focused on minimalist design approaches: while retaining many of the advantages of anthropomorphic design, a principled simplification in both design and control can sensibly reduce the system complexity in terms of number of actuators, sensors, and lines of code to program. Additionally, soft-robotics approaches have been useful, with several recent hand prototypes designed according to such principles and achieving very good results in terms of grasping versatility, robustness, and reliability.
Related Works & Events
- SoftHand Pro (Unipi-IIT) @ Cybathlon 2020 Global Edition “Powered Arm Prosthesis Race”; [Watch here]