Yixuan Dang, M.Sc.
Yixuan
Dang
Technische Universität München
Informatik 6 - Lehrstuhl für Robotik, Künstliche Intelligenz und Echtzeitsysteme (Prof. Knoll)
Postadresse
Boltzmannstr. 3
85748 Garching b. München
Curriculum Vitae
I have been accepted as a PhD candidate in the Institute of Informatics, Chair of Robotics, Artificial Intelligence and Real-Time Systems of Technical University of Munich (TUM) since 2023. I'm supervised and mentored by Prof. Alois Knoll, and Dr. Zhenshan Bing. My primary research interest is in whisker-inspired tactile sensing and biomimetic mice robot. Before that, I received my bachelor's and master's degrees in computer science from Xidian University, China in 2019 and 2022. I was mainly focusing on adapted SLAM system for medical surgery robots and medical images processing.
My primary objective here for my PhD program is to incorporate the whisker-inspired tactile sensing mechanism into our biomimetic mice robot, with a particular focus on biological-inspired whisker sensory array design, tactile-based navigation for quadruped mice robot, in current stage. Several important papers have been published or submitted to leading robotics venues such as ICRA, IROS, from our previous works. If you are interested in working on any related topics in this project, feel free to reach out to me via email with your background and interests.
Thesis Proposals
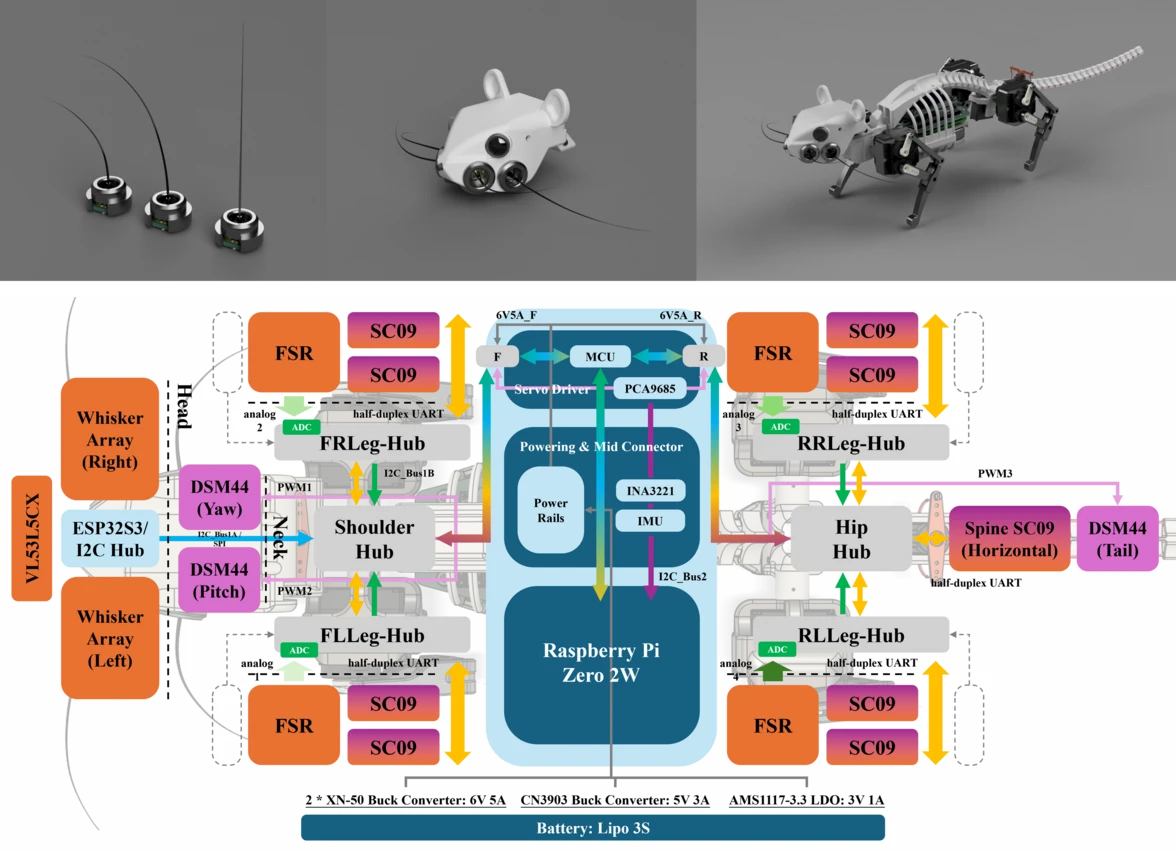
We aim to design and fabricate a whisker-inspired tactile sensor to enable exteroceptive sensing for a biomimetic mouse robot. Owing to its mechanical flexibility and low computational cost, the whisker sensor is ideally suited for assisting the biomimetic mouse robot in navigating confined, poorly lit, and unstructured environments. Ultimately, this sensor will be integrated into the mouse robot to build a contact-aware locomotion adaptation and tactile SLAM system, serving to enhance both the robot's environmental awareness and its reactive agility during operation.
Fundamental Algorithm Design: Dynamic Contact Estimate on Whisker-Inspired Tactile Sensor
Sensor and Hardware Integration: Exteroception with Whiskers Integration on Biomimetic Mouse Robot
Application Scenario: Contact-aware Locomotion Adaptation, Bio-inspired Navigation and Tactile SLAM
The project is constantly ongoing, and proposal documents are sometimes outdated. Feel free to reach out to me if you are interested in any related topics or aspects.