Planning and Human-Robot Interaction
The implementation of AI-based robotic applications that bring robots closer to humans in industrial and domestic environments is considered a grand challenge in robotics. For this, the seamless interaction, ranging from close physical collaboration during semi-autonomous telepresence to contact-aware motion and interaction planning in various environments needs to be realized.
Contributions
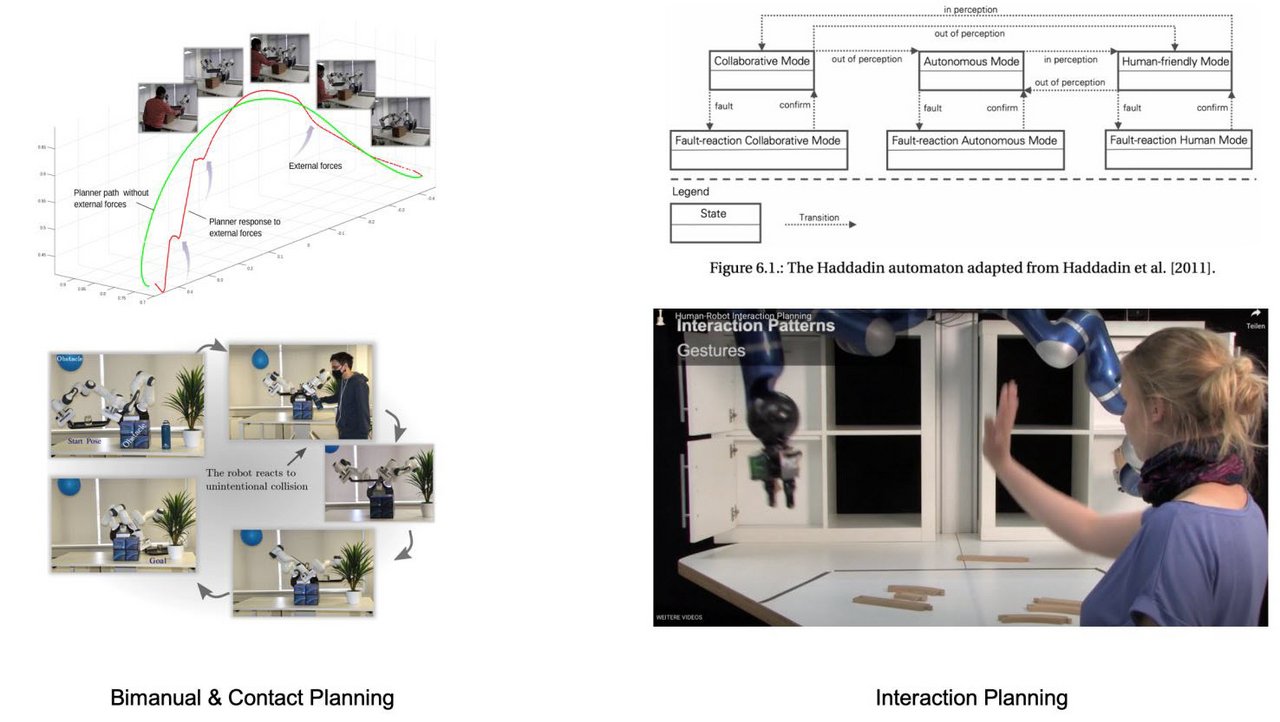
Our group’s work on dynamic motion planning and collision avoidance led to several novel algorithms that can deal with complex and dynamic environments with moving obstacles and unforeseen contacts for full scale articulated robots [137]. One the one hand, our work centers around the idea of exploiting the emerging behavior of dynamical systems that are designed to respond to physical and virtual contacts [139] for dynamic maneuvers [74, 140], and extended by multi-agent predictions to reach more sophisticated and globally optimal behavior [144]. On the other hand, we exploit geometric aspects of the task via constrained motion and use it to design more robust and reliable trajectory generators that can be directly integrated with lower-level control [145, 146]. Based on such dynamic motion layers, task and interaction planners were developed that allow for humans and robots to collaborate, jointly perform a task such as assembly or simply safely coexist [147, 148]. Connecting robot motion to natural language interaction has also been an important goal of our work, as it is one of the most intuitive ways to express human intent. We proposed a flexible language-based framework that allows a user to modify generic robotic trajectories for intuitive human-robot interaction [150].
A further focus of our work is the development of tactile telepresence frameworks such as A-RIFT [151], which is a zero-cost interface globally accessible via consumer Internet. Moreover, we translated our results in shared interaction control to specialized telemedicine [152], and telerehabilitation [135] systems, enabling medical experts to safely examine patients remotely, which was clinically used during the COVID-19 pandemic, where we also investigated the usability for medical experts [154]. Other tactile telepresence systems we developed cover unmanned aerial vehicles (UAVs) [80].
To supplement physical safety on a cognitive level, we investigated acceptance in human-robot interaction scenarios. For example, we investigated the role size and posture of articulated structures and humanoids have on human comfort and perceived safety [155, 156]. Furthermore, we analyzed the perceived safety to understand which accelerations and velocities are considered trustworthy in human-robot collaboration scenarios [157, 158]. In this context, proposing the embedded ethics approach for the development of AI, VR robotics, and digital twins has been an important milestone [159]. I believe such approaches will help us to build trustworthy AI technologies designed for reality and to improve our quality of life.
[74] Jonathan Vorndamme, Luis Figueredo, and Sami Haddadin. “Robot Contact Reflexes: Adaptive Maneuvers in the Contact Reflex Space”. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022, pp. 6687–6694.
[80] Alexander Moortgat-Pick, Anna Adamczyk, Teodor Tomic, and Sami Haddadin. “Feeling the ´True Force in Haptic Telepresence for Flying Robots”. In: 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2020, pp. 9789–9796.
[135] Mario Tröbinger, Andrei Costinescu, Hao Xing, Jean Elsner, Tingli Hu, Abdeldjallil Naceri, Luis Figueredo, Elisabeth Jensen, Darius Burschka, and Sami Haddadin. “A Dual Doctor-Patient Twin Paradigm for Transparent RemoteExamination, Diagnosis, and Rehabilitation”. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2021, pp. 2933–2940.
[137] Sami Haddadin, Rico Belder, and Alin Albu-Schäffer. “Dynamic motion planning for robots in partially unknown environments”. In: Proceedings of the 18th IFAC World Congress, 2011. Vol. 18. Milan, Italy, 2011, pp. 6842–6850.
[139] Riddhiman Laha, Luis F.C. Figueredo, Juraj Vrabel, Abdalla Swikir, and Sami Haddadin. “Reactive Cooperative Manipulation based on Set Primitives and Circular Fields”. In: 2021 IEEE International Conference on Robotics and Automation (ICRA). 2021, pp. 6577–6584.
[140] Riddhiman Laha, Luis C. Figueredo, and Sami Haddadin. “Cooperative Reactive Multi-Agent Planning (CRMAP) in Dynamic Environments”. In: Robotics: Science and Systems (RSS) Workshop: Geometry and Topology in Robotics: Learning, Optimization, Planning, and Control, virtual. July, 2021.
[144] Marvin Becker, Torsten Lilge, Matthias A. Müller, and Sami Haddadin. “Circular Fields and Predictive Multi-Agents for Online Global Trajectory Planning”. In: IEEE Robotics and Automation Letters 6.2 (2021), pp. 2618–2625.
[145] Riddhiman Laha, Luis C. Figueredo, and Sami Haddadin. “Dual Arm Reactive Cooperative Manipulation in Unstructured and Constrained Environments”. In: IEEE International Conference on Robotics and Automation (ICRA), Bimanual Manipulation Workshop: Learning, Planning Control, Xi’an. 5, 2021.
[146] Riddhiman Laha, Ruiai Sun, Wenxi Wu, Dasharadhan Mahalingam, Nilanjan Chakraborty, Luis FC Figueredo, and Sami Haddadin. “Coordinate invariant user-guided constrained path planning with reactive rapidly expanding plane-oriented escaping trees”. In: 2022 International Conference on Robotics and Automation (ICRA). IEEE. 2022, pp. 977–984.
[147] Sven Parusel, Hannes Widmoser, Saskia Golz, Tobias Ende, Nico Blodow, Matteo Saveriano, Kai Krieger, Alexis Maldonado, Ingo Kresse, Roman Weitschat, Dongheui Lee, Michael Beetz, and Sami Haddadin. Human-Robot interaction Planning. AAAI 2014 Video Competition. 2014.
[148] Florian Voigt, Lars Johannsmeier, and Sami Haddadin. “Multi-Level Structure vs. End-to-End Learning in High-Performance Tactile Robotic Manipulation.” In: CoRL. 2020, pp. 2306–2316.
[150] Arthur Bucker, Luis Figueredo, Sami Haddadin, Ashish Kapoor, Shuang Ma, and Rogerio Bonatti. “Reshaping Robot Trajectories Using Natural Language Commands: A Study of Multi-Modal Data Alignment Using Transformers”. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022, pp. 978–984.
[151] Alexander Moortgat-Pick, Peter So, Michael J Sack, Emma G Cunningham, Benjamin P Hughes, Anna Adamczyk, Andriy Sarabakha, Leila Takayama, and Sami Haddadin. “A-RIFT: Visual Substitution of Force Feedback for a Zero-Cost Interface in Telemanipulation”. In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2022, pp. 3926–3933.
[152] Jonas Fuchtmann, Roman Krumpholz, Daniel Ostler, Abdeldjallil Naceri, Daniela Macari, Sami Haddadin, Dirk Wilhelm, Hubertus Feussner, and Maximilian Berlet. “New Method for Surgical Diagnostics - a Robotic Telemedical Approach”. In: Surgical technology international 39 (2021), pp. 28–33.
[154] Abdeldjallil Naceri, Jean Elsner, Mario Tröbinger, Hamid Sadeghian, Lars Johannsmeier, Florian Voigt, Xiao Chen, Daniela Macari, Christoph Jähne, Maximilian Berlet, Jonas Fuchtmann, Luis Figueredo, Hubertus Feußner, Dirk Wilhelm, and Sami Haddadin. “Tactile Robotic Telemedicine for Safe Remote Diagnostics in Times of Corona: System Design, Feasibility and Usability Study”. In: IEEE Robotics and Automation Letters 7.4 (2022), pp. 10296–10303.
[155] Tobias Ende, Sami Haddadin, Sven Parusel, Tilo Wüsthoff, Marc Hassenzahl, and Alin AlbuSchäffer. “A human-centered approach to robot gesture based communication within collaborative working processes”. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2011, pp. 3367–3374.
[156] Simone Nertinger, Robin Kirschner, Djallil Naceri, and Sami Haddadin. “Acceptance of Remote Assistive Robots with and without Human-in-the-Loop for Healthcare Applications”. In: International Journal of Social Robotics (Oct. 2022).
[157] Robin Jeanne Kirschner, Lisa Burr, Melanie Porzenheim, Henning Mayer, Saeed Abdolshah, and Sami Haddadin. “Involuntary Motion in Human-Robot Interaction: Effect of Interactive User Training on the Occurrence of Human Startle-Surprise Motion”. In: 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR). 2021, pp. 28–32.
[158] Robin Jeanne Kirschner, Henning Mayer, Lisa Burr, Nico Mansfeld, Saeed Abdolshah, and Sami Haddadin. “Expectable Motion Unit: Avoiding Hazards From Human Involuntary Motions in Human-Robot Interaction”. In: IEEE Robotics and Automation Letters 7.2 (2022), pp. 2993– 3000.
[159] Stuart McLennan, Amelia Fiske, Leo Celi, Ruth Müller, Jan Harder, Konstantin Ritt, Sami Haddadin, and Alena Buyx. “An embedded ethics approach for AI development”. In: Nature Machine Intelligence 2 (July 2020), pp. 1–3.