Injury Biomechanics and Safety
Physical human-robot-interaction (pHRI) aims at enabling humans and robots to share their workspace and to get into direct contact. To realize this, ensuring human safety is the most essential requirement. In this context, our work on injury biomechanics and safety in robotics unfolded into an entirely new research discipline tightly connected to injury biomechanics, forensics, and accident research. Our group developed the biomechanical analysis and quantification of potential human injuries in pHRI, which seeks the understanding of the inherent risks emanating from robot-human collisions. We established a new point of view on the relation between human and robot, allowing the quantification, modeling, and therefore even handling or mitigation of potential risks.
Contributions
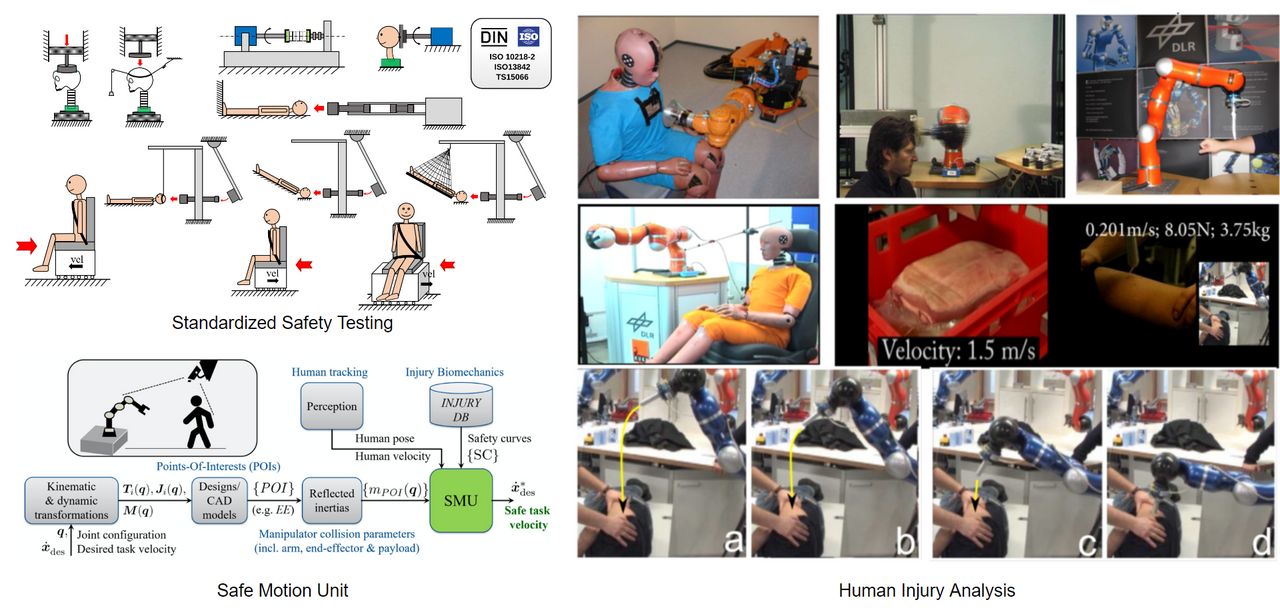
Together with medical centers, initial injury analyses were conducted and a database of injury occurrence in different risk scenarios was constructed [28, 109, 110, 111].
Massive amount of results have been obtained through extensive literature reviews, large-scale collision experiments and simulations. This provided unifying insights into the causal relation between robot design parameters and the system’s dynamic state on the one hand, and consequential degree of injury of humans in case of an unwanted collision on the other hand [114].
The gathered theoretical knowledge and practical experimental procedures from all reviewed studies and guidelines on injury evaluation through various testing setups and scenarios are introduced to robotics. Our work has lead to a more profound understanding of human injury biomechanics and is, consequently, also of great value to medical trauma research.
Moreover, based on the fundamental understanding of impact dynamics, we developed the standard algorithms to embed injury knowledge into real-time control [115] and planning [116, 117, 118] algorithms. We developed an entire algorithmic framework to understand the impact safety aspects of floating-base robots as complex as humanoids [119].
Additionally, various test devices for safety benchmarking and testing were established to obtain injury data from unconstrained and constrained collision scenarios in robotic applications [120, 121].
Last but not least, useful insights and standardized protocols for carrying out crash-testing [122] in robotics are provided and findings are continuously being communicated to the relevant standardization communities and their working teams on robot safety.
[28] Sami Haddadin, Haddadin Simon, Augusto Khoury, Tim Rokahr, Sven Parusel, Rainer Burgkart, Antonio Bicchi, and Alin Albu-Schäffer. “A truly safely moving robot has to know what injury it may cause”. In: Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ International Conference on. IEEE. 2012, pp. 5406–5413.
[109] S. Haddadin, A. Albu-Schäffer, and G. Hirzinger. “Soft-tissue injury in robotics”. In: IEEE International Conference on Robotics and Automation (ICRA). 2010, pp. 3426–3433.
[110] Sami Haddadin, Alin Albu-Schäffer, Fahed Haddadin, Jürgen Roßmann, and Gerd Hirzinger. “Study on Soft-Tissue Injury in Robotics”. In: Robotics Automation Magazine, IEEE 18.4 (Dec. 2011), pp. 20–34.
[111] Sami Haddadin, Simon Haddadin, Augusto Khoury, Tim Rokahr, Sven Parusel, Rainer Burgkart, Antonio Bicchi, and Alin Albu-Schäffer. “On making robots understand safety: Embedding injury knowledge into control”. In: The International Journal of Robotics Research 31.13 (2012), pp. 1578–1602.
[114] Mazin Hamad, Alexander Kurdas, Saeed Abdolshah, and Sami Haddadin. “Experimental Injury Biomechanics of Human Body Upper Extremities: Anatomy, Injury Severity Classification, and Impact Testing Setups”. In: 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR). 2021, pp. 310–315.
[115] S. Haddadin, S. Haddadin, A. Khoury, T. Rokahr, S. Parusel, R. Burgkart, A. Bicchi, and A. AlbuSchäffer. “On Making Robots Understand Safety: Embedding Injury Knowledge into Control”. In: International Journal of Robotics Research 31.13 (2012), pp. 1578–1602.
[116] Nico Mansfeld, Mazin Hamad, Marvin Becker, Antonio Gonzales Marin, and Sami Haddadin. “Safety Map: A Unified Representation for Biomechanics Impact Data and Robot Instantaneous Dynamic Properties”. In: IEEE Robotics and Automation Letters 3.3 (2018), pp. 1880–1887.
[117] Riddhiman Laha, Wenxi Wu, Ruiai Sun, Nico Mansfeld, Luis F.C. Figueredo, and Sami Haddadin. “S∗ : On Safe and Time Efficient Robot Motion Planning”. In: IEEE International Conference on Robotics and Automation (ICRA). 2022.
[118] Mazin Hamad, Nico Mansfeld, Saeed Abdolshah, and Sami Haddadin. “The Role of Robot Payload in the Safety Map Framework”. In: IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2019, pp. 195–200.
[119] Sami Haddadin. “Dynamic and Safe Motion Planning for Human Environments”. In: IROS 2014 Workshop: Real-time Motion Generation & Control – Constraint-based Robot Programming. 2014.
[120] Mazin Hamad, Alexander Kurdas, Saeed Abdolshah, and Sami Haddadin. “A Robotics Perspective on Experimental Injury Biomechanics of Human Body Upper Extremities”. In: 2021 IEEE International Conference on Intelligence and Safety for Robotics (ISR). 2021, pp. 316–320.
[121] Thomas Steinecker, Alexander Kurdas, Nico Mansfeld, Mazin Hamad, Robin Jeanne Kirschner, Saeed Abdolshah, and Sami Haddadin. “Mean Reflected Mass: A Physically Interpretable Metric for Safety Assessment and Posture Optimization in Human-Robot Interaction”. In: 2022 International Conference on Robotics and Automation (ICRA). 2022, pp. 11209–11215.
[122] Karan Sharma, Sami Haddadin, Sebastian Minning, Johann Heindl, Tobias Bellmann, Sven Parusel, Tim Rokahr, and Alin Albu-Schaeffer. “Evaluation of human safety in the DLR Robotic Motion Simulator using a crash test dummy”. In: IEEE International Conference on Robotics and Automation (ICRA). 2013, pp. 205–212.