Open Student Thesis Offers
The lists below are sorted by research topic and comprise offers for bachelor's theses (BA), master's thesis (MA), semester theses (SA), guided research (GR), and research internships (RI). Please contact the advisors in the respective research topics for further information. You are welcome to propose thesis topics of your own!
A guide to writing good theses can be found here. A collection of useful material for research can be found here.

Autonomous Vehicles
We pursue a wide range of research directions related to safe decision making, motion planning and control for autonomous vehicles, involving formal methods, sampling-based and optimization-based methods, and deep learning-based methods.
Contact: Ansgar Kasselmann, Florian Lercher, Shuaiyi Li, Sebastian Mair, Tobias Mascetta, Lars Frederik Peiß, Roland Stolz, Youran Wang
Topics:
- [MA/BA/GR/SA] Modular Mechanical Design of an Autonomous Truck
- [MA external] Generative AI for Autonomous Driving (f/m/d) | Volkswagen AG (external link)
- [Semester Thesis / Guided Research] Learning-based Hybrid Control in Autonomous Driving
- [Semester Thesis / Guided Research] Development of an evaluation pipeline for a real autonomous vehicle
- [MA/BA/GR/SA] Comparative Study of Collision Checking for Autonomous Vehicles
Modular Robotics

Safe Physical Human Robot Interaction

Contact: Yue Zhang, Kuanqi Cai
Safe & Multi-Agent & Offline Reinforcement Learning
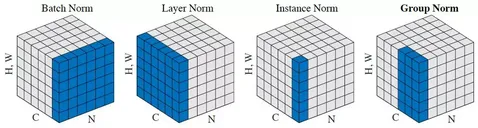
Machine Learning and Optimization
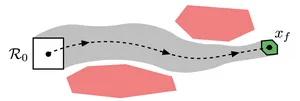
Formal Methods and Reachability Analysis
Research Directions:
- Formal Verification of Neural Networks and Robust Training: Lukas Koller, Tobias Ladner
- Fundamentals on Set Representations: Sebastian Sigl
- System Identification and Conformance Checking: Laura Lützow
- Optimization and Data Driven Control: Lukas Schäfer, Yongkuan Zhang
- Reachability Analysis of Dynamic Systems: Maximilian Perschl
- Temporal Logic Verification and Application to Autonomous Vehicles: Florian Lercher
- Set-Based Observers: Nico Holzinger
Topics:
- [MA] Set-Based Modelling of District Heating Networks, Collaboration with Stadtwerke München (SWM)
- If you find one of these research directions interesting, please visit the individual websites and contact them directly (CV+ToR).
- We are also always open to discuss thesis topics even if there are no specific topics currently listed on the website. Please have a look at previous works and tell us which direction you find interesting.
Mobile Robotics for Construction Tasks

Tech Topics: Claus Carste, Julian Hoffman, Nicola Kolb
- [MA] Automation of Building Insulation Installation Using Mobile Robots - Carste
- [MA] Automation of Construction Site Tasks Using Teleoperated Mobile Robots - Carste
- [MA/GR] Sensor-Guided Force-Controlled Robotics to Bridge the Sensor-Reality Gap - Carste
- [MA/GR] Real-Time AI-Driven Motion Optimization of Slightly Compliant Robotic Robotic Systems - Carste
- [MA] Tablet-Based Scan-to-BIM Integration for Construction Robotics Applications - Carste
- [MA] Automated Scan-to-BIM pipeline for construction-site robotics - Hoffmann
- [MA/BA] Fleet-Level Robot Orchestration Dashboard for Performance Monitoring and Remote Debugging - Hoffmann
- [BA] ]High Deatil Surface Reconstruction for Robotic Manipulation on construction sites - Hoffmann
- [BA/GR] Development of an intuitive 3D Human-Machine-Interface for Construction-Site Robotic Task Planning - Hoffmann
- [MA/GR] Embodied and Agentic AI for Autonomous Robots on Construction Sites - Hoffmann
- [MA/GR] From the laboratory to open environments: Reachability-based safety verification (contact: nicola.kolb@tum.de)
- [MA/GR] Modular and Compositional Risk Assessment for Modular Robots in Unstructured Environments (contact: nicola.kolb@tum.de)
- [BA/GR] Metamorphic Testing of AI-based Construction Robots (contact: nicola.kolb@tum.de)
- [BA] CI/CD Pipeline for a Construction Robot Application (contact: nicola.kolb@tum.de)
Business Topics: Dr. Lena-Marie Pätzmann