

2025
- LensDFF: Language-enhanced Sparse Feature Distillation for Efficient Few-Shot Dexterous Manipulation. 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025 mehr… BibTeX
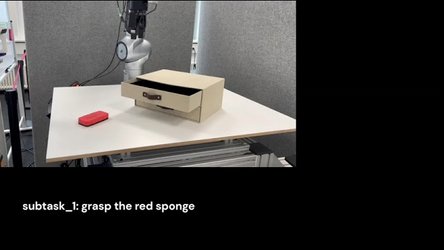
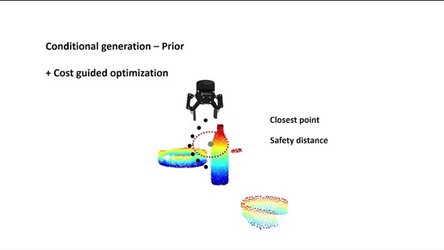
- Language-Guided Object-Centric Diffusion Policy for Collision-Aware Robotic Manipulation, 2025 mehr… BibTeX Volltext ( DOI )
- Language-guided object-centric diffusion policy for generalizable and collision-aware manipulation. 2025 IEEE International Conference on Robotics and Automation (ICRA), 2025 mehr… BibTeX
- Language-guided object-centric diffusion policy for collision-aware robotic manipulation. International Conference on Robotics and Automation (ICRA), 2025 mehr… BibTeX Volltext ( DOI )
- LensDFF: Language-enhanced Sparse Feature Distillation for Efficient Few-Shot Dexterous Manipulation, 2025 mehr… BibTeX
2024
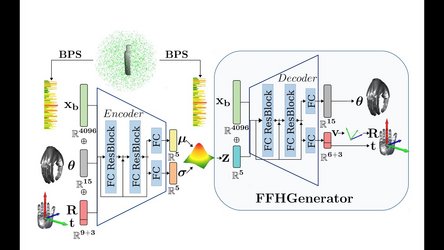
- FFHFlow: a flow-based variational approach for multi-fingered grasp synthesis in real time. arXiv, 2024 mehr… BibTeX
- Ffhflow: A flow-based variational approach for learning diverse dexterous grasps with shape-aware introspection. arXiv e-prints, 2024, arXiv--2407 mehr… BibTeX Volltext ( DOI )
- FFHFlow: Diverse and Uncertainty-Aware Dexterous Grasp Generation via Flow Variational Inference. arXiv preprint arXiv:2407.15161, 2024 mehr… BibTeX Volltext ( DOI )
- Dexgangrasp: Dexterous generative adversarial grasping synthesis for task-oriented manipulation. 2024 IEEE-RAS 23rd International Conference on Humanoid Robots (Humanoids), 2024 mehr… BibTeX
- Language-guided object-centric diffusion policy for generalizable and collision-aware robotic manipulation. arXiv preprint arXiv:2407.00451, 2024 mehr… BibTeX Volltext ( DOI )
- Generalizable robotic manipulation: Object-centric diffusion policy with language guidance. Workshop on Embodiment-Aware Robot Learning, 2024 mehr… BibTeX
- DexGANGrasp: Dexterous Generative Adversarial Grasping Synthesis for Task-Oriented Manipulation, 2024 mehr… BibTeX Volltext ( DOI )
- FFHFlow: A Flow-based Variational Approach for Multi-fingered Grasp Synthesis in Real Time, 2024 mehr… BibTeX Volltext ( DOI )
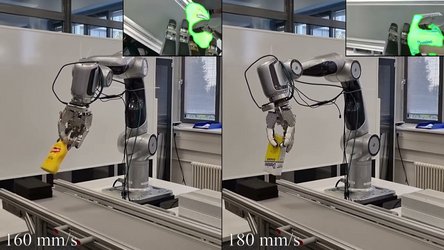
- Multi-fingered Dynamic Grasping for Unknown Objects, 2024 mehr… BibTeX Volltext ( DOI )
- Evaluating Uncertainty-based Failure Detection for Closed-Loop LLM Planners. , 2024 mehr… BibTeX Volltext ( DOI )
- Evaluating Uncertainty-based Failure Detection for Closed-Loop LLM Planners. IEEE 2024 International Conference on Robotics and Automation (ICRA), 2024Workshop Back to the Future: Robot Learning Going Probabilistic mehr… BibTeX
2023
- Multi-fingered Dynamic Grasping for Unknown Objects. , 2023 mehr… BibTeX Volltext ( DOI )
- Dynamic grasping of unknown objects with a multi-fingered hand. arXiv preprint arXiv:2310.17923, 2023 mehr… BibTeX
2022
- Efficient Grasp Detection Network With Gaussian-Based Grasp Representation for Robotic Manipulation. IEEE/ASME Transactions on Mechatronics, 2022, 1-11 mehr… BibTeX Volltext ( DOI )
- FFHNet: Generating Multi-Fingered Robotic Grasps for Unknown Objects in Real-time. 2022 International Conference on Robotics and Automation (ICRA), 2022 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- Sim-to-Real Transfer of Robotic Assembly with Visual Inputs Using CycleGAN and Force Control. CoRR abs/2208.14104, 2022 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
2021
- Adaptive Generalized Cross-Entropy Loss for Sound Event Classification with Noisy Labels. 2021 IEEE Workshop on Applications of Signal Processing to Audio and Acoustics (WASPAA), 2021 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- Proactive Action Visual Residual Reinforcement Learning for Contact-Rich Tasks Using a Torque-Controlled Robot. 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
- Combining Learning from Demonstration with Learning by Exploration to Facilitate Contact-Rich Tasks. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)
2020
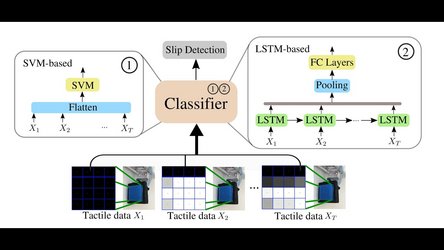
- Center-of-Mass-based Robust Grasp Planning for Unknown Objects Using Tactile-Visual Sensors. 2020 IEEE International Conference on Robotics and Automation (ICRA), 2020 mehr… BibTeX Volltext ( DOI ) Volltext (mediaTUM)