Research agenda
Let's imagine a scenario where a humanoid robot starts to tidy up our house when we leave in the morning and
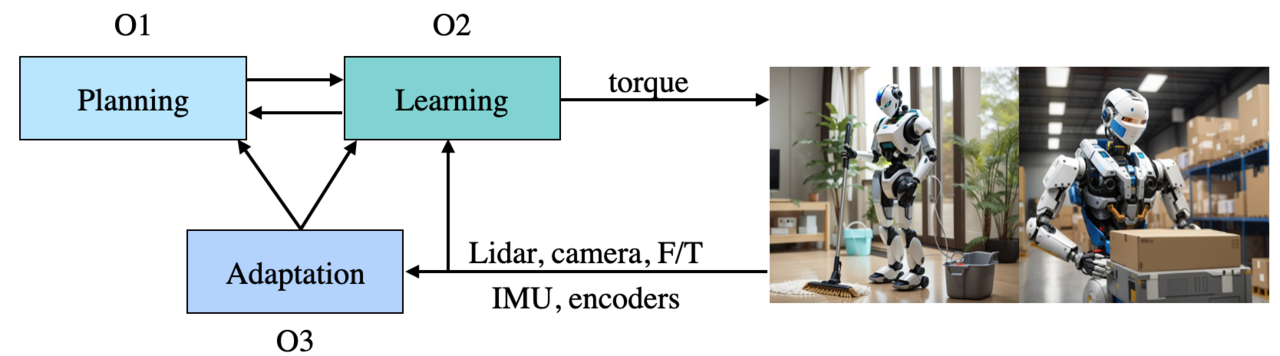
delivers a clean house in the evening. To do that the robot would face a different cluttered house every morning and needs to autonomously plan a sequence of actions. It is also important for the robot to update its plan, if the robot fails to successfully execute part of the plan. Finally, the robot needs to interact with a wide range of objects and surfaces. To date, there exists no general framework that endows a humanoid robot with these capabilities. In ATARI we aim to develop a general framework toward a humanoid worker which can autonomously manipulate its surroundings and quickly adapt to unsuccessful executions of plans and changes in the environments. A systematic validation of the framework in real-world scenarios is also an important aspect of our researcch.
Optimal control for robotics
In our lab we develop advanced and efficient solvers to control high-dimensional robotic systems in contact with environments. Here are some of the motions we generated using those solvers

Machine learning for robotics
We use techniques from machine learning to speed up our solvers and to improve our controllers as they interact more and more with the world.
Developing open-source robots
We also contribute to the development of open-source hardware for research. Our robots are high-performance and torque-controlled and they are designed for research purposes. You can find all our robots and the instructions on how to build them on our ODRI webpage https://open-dynamic-robot-initiative.github.io.